برق-قدرت
اینجا فقط از برق و الکترونیک و کامپیوتر حرف می زنیمبرق-قدرت
اینجا فقط از برق و الکترونیک و کامپیوتر حرف می زنیمدرباره من
 از کتاب خواندن خیلی لذت می برم و از فیلم دیدن... همین و بس
ادامه...
از کتاب خواندن خیلی لذت می برم و از فیلم دیدن... همین و بس
ادامه...
ترانسفورماتورهای اصلاح شده بر اساس کی فاکتور
رضاکیانی موحد
با نفوذ گسترده ی قطعات الکترونیک قدرت (دیودها، تریستورها و غیره) در دستگاه ها و تجهیزات صنعتی، افزایش هارمونیک های تزریق شده توسط این قطعات به شبکه ی قدرت به یکی از مشکلات عمده ی شرکتهای توزیع انرژی الکتریکی تبدیل شده است.
هارمونیکها اثرات نامطلوبی بر روی شبکه و مصرف کنندگان دارند که از جمله ی آنها می توان به گرم کردن ترانسفورماتورها اشاره کرد. هنگامی که ترانسفورماتوری یک بار غیرخطی (یو.پی.اس، چراغهای کم مصرف، راه اندازها و کنترل کننده های دور موتورهای الکتریکی و غیره) را تغذیه می کند هارمونیک ایجاد شده توسط بار غیرخطی سبب می شود که بهره بردار مجبور شود توانی کمتر از توان اسمی ترانسفورماتور از آن بکشد تا از داغ شدن بیش از حد و آسیب رسیدن به عایقهای سیم پیچ ها جلوگیری کند. جریانهای ناشی از هارمونیکها سبب می شود که تلفات ترانسفورماتور بالا رفته و حرارتی بیش از حد لازم تولید شود. به همین دلیل و به منظور تصحیح توانی که می توان از یک ترانسفورماتور در حالتی که بارهای غیرخطی را تغذیه می کند گرفت، عاملی به نام K تعریف شده است. کی فاکتور را می توان به عنوان وزن جریانهای هارمونیک تعریف کرد. اگر یک بار خطی توسط ترانسفورماتور تغذیه شود کی فاکتور آن را برابر با یک تعریف می کنیم. هر چه بار غیرخطی جریانهای هارمونیک بیشتری بکشد، کی فاکتور آن بالاتر می رود. محاسبه ی کی فاکتور سبب می شود که مصرف کننده بتواند ترانسفورماتوری مناسبتر و با توانی بالاتر را برای مصارف خود سفارش بدهد.
برای محاسبه ی کی فاکتور در ابتدا باید جریانهای هارمونیک توسط دستگاه تحلیل کننده ی هارمونیک اندازه گیری شود. سپس جریانها به توان دو رسیده و پس از ضرب شدن در مربع هارمونیک این اعداد با هم جمع خواهند شد. به عنوان مثال اگر یک جریان دارای 10% جریان هارمونیک سوم، 5% جریان هارمونیک پنجم و 3 % جریان هارمونیک هفتم باشد کی فاکتور آن به صورت زیر محاسبه خواهدشد:

مقدار ضریب تصحیح که باید مصرف کننده در توان نامی ترانسفورماتور خود ضرب کند از روی اطلاعات سازنده ی ترانسفورماتور و بر اساس مقدار کی فاکتور محاسبه شده توسط مصرف کننده به دست می آید. برای مقاصد عملی باید کی فاکتور در یک دوره ی بلند مدت اندازه گیری شود و پس از آن نیز همواره پایش شود.
امروزه ،برای کمک کردن به خریداران در انتخاب ترانسفورماتور مناسب، بعضی از سازندگان ترانسفورماتور تولیداتشان را بر اساس کی فاکتور به بازار عرضه می کنند. این ترانسفورماتورهای جدید قادر به تحمل حرارت اضافی تولید شده توسط جریانهای هارمونیک هستند به شرطی که کی فاکتور مصرف کننده از مقداری که سازنده در نظر گرفته است بیشتر نشود. در این نوع ترانسفورماتورها مصرف کننده نیازی به استفاده از ضریب تصحیح برای کاهش توان خروجی ترانسفورماتور ندارد چرا که هدف از ساخت این گونه ترانسفورماتورها محاسبه ی کی فاکتور بارهای غیرخطی و ساخت ترانسفورماتوری مناسب برای آن می باشد. استفاده از ترانسفورماتورهای جدید اقتصادی تر از خریداری یک ترانسفورماتور معمولی ولی بزرگتر می باشد. ترانسفورماتورهای اصلاح شده بر اساس کی فاکتور برای کی فاکتورهای 4،9،13،20،30،40،50 ساخته می شوند.
علاوه بر صرفه ی اقتصادی، استفاده از ترانسفورماتورهای اصلاح شده بر اساس کی فاکتور مزیتهای دیگری نیز بر ترانسفورماتورهای عادی دارند. در صورت وجود جریانهای هارمونیک ،به دلیل اندازه ی بزرگتری که باید برای ترانسفورماتورهای عادی در نظر گرفت، سطح جریان اولیه نسبت به ثانویه باید بالاتر در نظر گرفته شود و اگر سطح حفاظت کاهش بیابد ممکن است که جریان هجومی ترانسفورماتور سبب تریپ دادن رله های اضافه جریان شود.
در جدول زیر انواع ترانسفورماتورهای اصلاح شده را بر اساس کی فاکتور بر حسب نوع بار و مقدار کی فاکتور ملاحظه می کنید:
|
بار |
کی فاکتور |
|
لامپ کم مصرف، یو.پی.اس با فیلتر هارمونیک، جوشکاری با قوس الکتریکی، کوره های القایی، پی.ال.سی و کنترل کننده های صنعتی |
4 |
|
تجهیزات مخابراتی، یو.اس.پی بدون فیلتر، تجهیزات اتاق عمل، تجهیزات آزمایشگاهی، تجهیزات آموزشی |
13 |
|
ابرکامپیوتر، راه انداز و کنترل کننده ی دور موتور، تجهیزات بیمارستانی |
20 |
سیستم کنترل دور وارد لئونارد
رضاکیانی موحد
تا قبل از اینکه کنترل کننده های دور الکترونیکی به صورت گسترده وارد بازار شوند موتورهای القایی 3 فاز در کاربردهایی با دور متغیر جایی نداشتند. هر چند که این گونه موتورها دارای ساختمانی ساده و در نتیجه ارزان قیمت هستند اما کنترل دور آنها تنها با تغییر قطبها یا تغییر فرکانس منبع تغذیه صورت می گیرد که این موارد کنترل دور موتورهای القایی را پر هزینه و در مواردی غیرممکن می کند.
در عوض، موتورهای جریان مستقیم ساختمانی پیچیده دارند، هزینه ی ساخت و نگهداری آنها بالاست و نیاز به تعمیرات دوره ای بیشتر از موتورهای القایی پیدا می کنند. اما مزیت موتورهای جریان مستقیم نسبت به موتورها القایی در این است که سرعت (و گشتاور) آنها را می توان به راحتی کنترل کرد.
یکی از مهمترین و پر کاربردترین روشهای کنترل دور موتور جریان مستقیم روش کنترل دور در قرن گذشته وارد لئونارد می باشد. این روش در سال 1891 توسط مهندس آمریکایی به همین نام اختراع شد و حتی تا به امروز نیز می توان بازمانده های آن را در بعضی از کارخانه های صنعتی پیدا کرد.
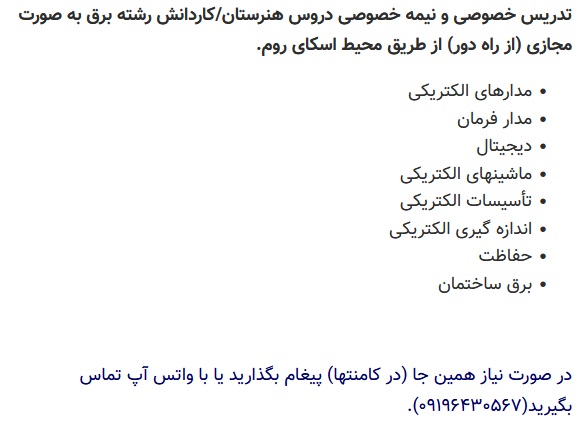
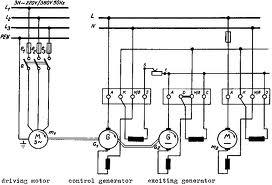
اجزای اصلی سیستم واردلئونارد عبارتند از یک منبع قدرت، ژنراتور تحریک و یک موتور جریان مستقیم. منبع قدرت یک ژنراتور جریان مستقیم است که از یک منبع خارجی (موتور دیزل، موتور بخار، موتور الکتریکی و غیره ) تحت سرعتی ثابت نیرو می گیرد. ولتاژ خروجی منبع قدرت به آرمیچر موتور جریان مستقیم (شانت) اعمال می شود. ژنراتور تحریک یک ژنراتور جریان مستقیم کوچک است که از همان منبع خارجی که به منبع قدرت متصل شده است می گیرد و وظیفه دارد تا جریان تحریک ژنراتور جریان مستقیم را تأمین کند. جریان تحریک را می توان توسط یک مقاومت متغیر از صفر تا 100 درصد تغییر داد و بدین وسیله ولتاژ خروجی ژنراتور جریان مستقیم را کنترل و تنظیم کرد.
اجزای اصلی سیستم واردلئونارد- برای تغذیه ی سیم پیچهای میدان هر 3 ماشین از منبع جریان خارجی استفاده شده است.
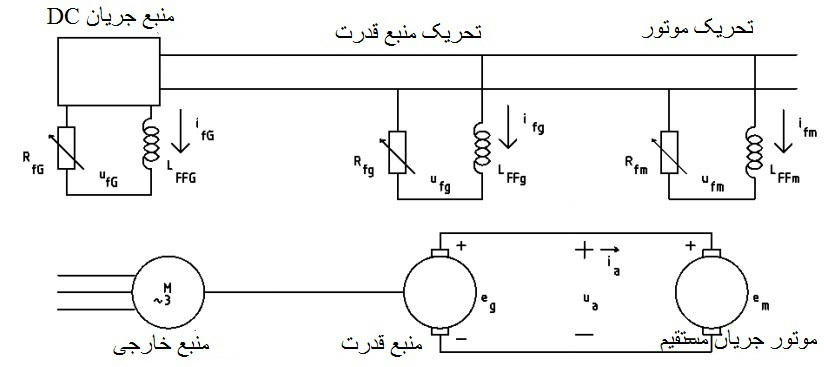
اجزای اصلی سیستم وارد لئونارد. برای تغذیه سیم پیچهای میدان ماشینها از خروجی خود ژنراتور DC استفاده شده است.
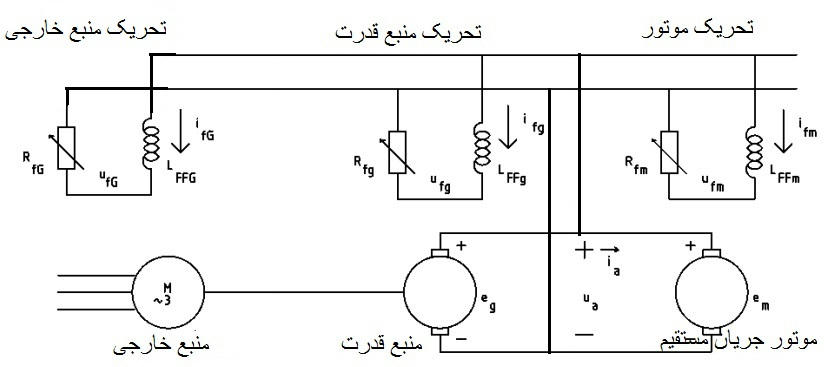
اجزای اصلی سیستم واردلئونارد. برای تغذیه سیم پیچ میدان موتور جریان مستقیم از یک زنراتور dc کوچک استفاده شده است.
محور موتور جریان مستقیم به بار اتصال پیدا می کند و گشتاور خروجی آن سبب چرخش محور مکانیکی بار می گردد. همان طور که گفته شد ولتاژ آرمیچر آن توسط ژنراتور جریان مستقیم و جریان تحریک آن یا به صورت جداگانه یا از طریق ژنراتور تحریک تأمین می شود. با این پیکربندی می توان سرعت موتور (و در نتیجه سرعت بار) را با تغییر جریان تحریک ژنراتور تغییر داد. در این روش برای به دست آوردن گشتاور مکانیکی به 3 وسیله (به جای یک موتور) نیازمندیم. از این رو روش کنترل واردلئونارد روشی است که ملاحظات اقتصادی در آن اولویت اول نمی باشد. هزینه های نگهداری، تعمیر یاتقانها، زغالها و... این سیستم را پرهزینه می کنند.
مزیت اصلی سیستم وارد لئونارد راه اندازی نرم و کنترل سرعت خوب حتی در دورهای پایین است. سیستمهای کنترل دور مبتنی بر رئوستا هیچگاه چنین راه اندازی نرمی را برای موتورهای جریان مستقیم فراهم نمی کنند.
سیستم وارد لئونارد دو نوع مختلف دارد:
الف کنترل ولتاژ موتور
در این روش جریان تحریک موتور جریان مستقیم ثابت نگه داشته می شود و با تغییر جریان تحریک ژنراتور ولتاژ خروجی آن و در نتیجه سرعت موتور جریان مستقیم تغییر می کند.
ب- کنترل تحریک موتور
با کم کردن جریان تحریک موتور می توان سرعت آن را بالابرد. در این روش ولتاژ ورودی موتور را به وسیله ی ثابت نگه داشتن تحریک ژنراتور ثابت نگه می دارند و جریان تحریک موتور را کم می کنند. در نتیجه با افزایش سرعت موتور گشتاور خروجی آن کاهش می یابد.
هرچند که امروزه در بیشتر صنایع کنترل کننده های تریستوری جایگزین سیستم وارد لئونارد شده اند اما در گذشته در مواردی مانند جرثقیلها، بالابرها، برجک توپ کشتی ها، لکوموتیوها و پرسها به صورتی گسترده ای از این سیستم استفاده شده است.