برق-قدرت
اینجا فقط از برق و الکترونیک و کامپیوتر حرف می زنیمبرق-قدرت
اینجا فقط از برق و الکترونیک و کامپیوتر حرف می زنیمدرباره من
 از کتاب خواندن خیلی لذت می برم و از فیلم دیدن... همین و بس
ادامه...
از کتاب خواندن خیلی لذت می برم و از فیلم دیدن... همین و بس
ادامه...
PUT
همان گونه که قبلا گفتیم ترانزیستورهای تک پیوندی مدتها است که منسوخ شده اند و در مصارف صنعتی از ترانزیستورهای تک پیوندی قابل برنامه ریزی یا PUT ها استفاده می شود. PUT با قیمت پایینتر و کیفیت بهتر از UJT در دسترس است. این قطعه ی الکترونیک در حقیقت یک نوع تریستور با 3 پایه می باشد. PUT از ساختار 4 لایه ی کلاسیک تریستورها بهره می برد. توجه کنید که گیت PUT به لایه ی N نزدیک آند وصل شده است. به علاوه گیت در علامت سمبولیک قطعه نیز پایه ی گیت در نزدیکی آند قرار دارد.

تصویر1: PUT ؛ منحنی کارکرد، ساختار داخلی و نمای شماتیک.
منحنی کارکرد PUT نیز در شکل 1 نمایش داده شده و شبیه به منحنی کارکرد UJT می باشد. جریان آند در برابر ولتاژ آند ترسیم شده است. ولتاژ قله آند VP نام دارد. زمانی که جریان آند افزایش می یابد ولتاژ آند نیز تا VP افزایش می یابد. پس از آن با افزایش جریان ولتاژ کاهش می یابد تا به ولتاژ دره VV برسد.
در تصویر2 PUT به صورت معادل با UJT رسم شده است. مقاومتهای خارجی R1 و R2 جانشین مقاومتهای داخلی RB1 و RB2 در ساختار UJT شده اند. مقاومتها اجازه می دهند تا η قابل محاسبه شوند.

تصویر2: PUT به جای UJT
در تصویر3 می بینیم که چگونه می توان از PUT به صورت یک نوسان ساز استفاده کرد. بازهم مشابه با UJT، مقاومت R وظیفه ی شارژ خازن را برعهده دارد. با رسیدن ولتاژ خازن به ولتاژ قله PUT در ناحیه ی مقاومت منفی عمل می کند و یک جریان با شکل موج سوزنی از درون کاتد آن عبور می کند. این جریان سبب ایجاد یک موج ولتاژ سوزنی بر روی مقاومت کاتد می شود. پس از تخلیه ی خازن PUT قطع می شود و شارژ مجدد خازن صورت می گیرد.

تصویر3:PUT به عنوان تولید کننده ی موج سوزنی
سوالی که مطرح می شود درباره ی مقدار مقاومت R است تا نوسان ساز بتواند کار کند؟ مقاومت شارژ کننده ی خازن باید آنقدر کوچک باشد تا بتواند جریان لازم برای شارژ خازن تا ولتاژ Vp را تأمین کند. وقتی ولتاژ خازن به Vp می رسد ولتاژ آند با افزایش جریان افت می کند(ناحیه ی مقاومت منفی) که کارکرد PUT را به ناحیه ی دره منتقل می کند. وظیفه ی خازن است که جریان دره Iv را تأمین کند. هنگامی که خازن تخلیه شد نقطه ی کار PUT به بالای شیب نقطه ی قله می رسد. حال مقاومت باید آنقدر زیاد باشد که جریان نقطه ی بالای دره Ip از آن عبور نکند. اگر جریان بیشتری از طریق مقاومت عبورکند مقاومت پس از تخلیه ی خازن جریان دره را تأمین می کند و نقطه ی کار هیچ گاه به سمت چپ نقطه ی قله بازنمی گردد.
ما ولتاژ تغذیه را همانند مثال UJT برابر با 10 ولت فرض کرده ایم. مقادیر R1 و R2 را آنچنان انتخاب کرده ایم که η تقریبا برابر با 3/2 بشود. η و Vs محسابه شده اند. مقاومت موازی معادل R1 و R2 مقاومت RG است که و از جدول زیر به دست آمده است. با VS=10 نزدیک ترین مقدار به 6.3 ولتاژ VT=0.6V را به دست می دهد.

ما همچنین مقادیر Ip و Iv را محاسبه کرده ایم ولی هنوز نیاز داریم تا Vv را حساب کنیم. ما از 10% مقدار VBB= 1V در مثال قبل استفاده کرده ایم. بر اساس مشخصات فنی قطعه در جریان IF=50mA باید VF=0.8 باشد. جریان IV=70µA کمتر از IF=50mA شده است. بنابراین، Vv باید کمتر از VF=0.8V باشد. اما چقدر کمتر؟ برای ایمنی بیشتر این ولتاژ را صفر گرفته ایم. این امر محدوده ی پایین جریان در مقاومت را اندکی بالابرده است.

با بکاربردن مقاومت بیش از 143کیلواهم می توان تضمین کرد که بازگشت به نقطه ی آغازین کارکرد پس از تخلیه ی خازن امکان پذیر است. با انتخاب مقاومت کمتر از 755 کیلواهم اجازه می دهد تا خازن تا مقدار Vp شارژ شود. در زیر جدول مشخصات فنی PUT به شماره 2n6027 آمده است.
|
Parameter |
Conditions |
min |
typical |
max |
units |
|
VT |
|
|
|
|
V |
|
|
VS=10V, RG=1Meg |
0.2 |
0.7 |
1.6 |
|
|
|
VS=10V, RG=10k |
0.2 |
0.35 |
0.6 |
|
|
IP |
|
|
|
|
µA |
|
|
VS=10V, RG=1Meg |
- |
1.25 |
2.0 |
|
|
|
VS=10V, RG=10k |
- |
4.0 |
5.0 |
|
|
IV |
|
|
|
|
µA |
|
|
VS=10V, RG=1Meg |
- |
18 |
50 |
|
|
|
VS=10V, RG=10k |
70 |
150 |
- |
|
|
|
VS=10V, RG=200Ω |
1500 |
- |
- |
|
|
VF |
IF=50mA |
- |
0.8 |
1.5 |
V |
در تصویر4 یک PUT را می بینیم که به عنوان تولید کننده ی موج سوزنی برای فرمان دادن به تریستور بکاررفته است. این مدار نیاز به یک منبع تغذیه ی فیلتر نشده VBB دارد (در تصویر نشان داده نشده) مقاومت متغیر باید کمترین میزان را برای جلوگیری از قفل شدن PUT در ولتاژ دره داشته باشد.

تصویر4:PUT به عنوان مدار آتش یک تریستور
گفته می شود که PUT می تواند برای ساخت موجی با فرکانس 10کیلوهرتز مناسب باشد. اگر یک شکل موج پله ای خطی تر ،به جای شکل موج سوزنی، مورد نیاز باشد مقاومت شارژ کننده ی خازن را می توان با یک منبع جریان ثابت مانند FET عوض کرد.
منبع
http://www.allaboutcircuits.com/vol_3/chpt_7/8.html
ترانزیستور تک پیوندی
UJT یا ترانزیستور تک پیوندی گونه ای از قطعات الکترونیک قدرت است که در مدارات فرمان تریستورها مورد استفاده قرار می گرفت اما امروزه منسوخ شده است. UJT از نظر ساختاری شبیه یک دیود معمولی است و از یک پیوند P-N ساخته شده است. اما در UJT Tبر خلاف دیود معمولیT به شبکه ی کریستالی N به جای یک پایه دو پایه متصل شده است. (تصویر 1a). این پایه ها B1 و B2 و پایه ی سوم امیتر نام دارند. مقاومت بین این دو پایه RBBO نام دارد. به خاطر آرایش خاص این قطعه، UJT دارای مقاومت منفی در قسمتی از منحنی جریان-ولتاژ خود می باشد.

تصویر1- ترانزستور تک پیوندی
همانطور که در تصویر 2a مشاهده می شود با افزایش ولتاژ امیتر تا ولتاژ قله (Vp) جریان هم زیاد می شود اما پس از رسیدن به Vp وارد ناحیه مقاومت منفی می شویم و با افزایش جریان ولتاژ شروع به کاهش می کند تا به ولتاژ دره (Vv ) برسد. Ip و Iv به عنوان مثال برای UJT از نوع 2n2647 به ترتیب برابر با 2 میکروآمپر و 4 میلی آمپر می باشد. Vv در حدود 10 درصد ولتاژ VBB می باشد.

تصویر2- منحنی جریان-ولتاژ UJT
از خاصیت مقاومت منفی UJT می توان برای ساخت نوسانسازی با خروجی تقریبا سوزنی استفاده کرد. طبق تصویر 3 خازن متصل شده به امیتر از طریق مقاومت RE شارژ می شود. پس از اینکه ولتاژ CE به ولتاژ VP رسید UJT روشن می شود و دو پایه ی بیس را به هم وصل می کند. در این هنگام ولتاژ پایه ی B1 ،که به زمین وصل بود، بالا می رود. خازن CE از طریق امیتر و B1 تخلیه می شود و در نتیجه UJT بلافاصله قطع می شود و ولتاژ B1 دوباره به صفر افت می کند. خازن دوباره شروع به شارژ شدن می کند و این چرخه ادامه پیدا می کند.

تصویر3- اسیلاتور ساخته شده توسط UJT
در طی تخلیه ی خازن یک موج سوزنی بر روی مقاومت متصل به B1 ایجاد می شود. این مقاومت را باید کوچک انتخاب کرد تا در تخلیه ی خازن ایجاد اخلال نکند. فرکانس کاری مدار بستگی به ثابت زمانی مقاوت و خازن امیتر دارد. میزان دقیقتر فرکانس را می توان با فرمول تصویر 3 محاسبه کرد. همانطور که در تصویر c3 دیده می شود با نصب یک چوک ایمپالس به جای مقاوت B1 می توان از این موج سوزنی برای فرمان دادن به یک تریستور استفاده کرد.
با نصب یک مقاومت متغیر به جای REو تغییر ثابت زمانی مدار می توان فرکانس کاری مدار را تغییر داد. در انتخاب این مقاومت باید دقت کرد. محدوده ی RE بر اساس ولتاژ تغذیه ی مدار و مقادیر UJT تعیین می شود. با فرض ولتاژ تغذیه برابر با 10 ولت محاسبه RE برای ترانزیستور 2n2647 در زیر آمده است.

مترجم رضاکیانی موحد
منبع
http://www.allaboutcircuits.com/vol_3/chpt_7/8.html
ریسلور
بیشتر ریسولور(resolver)های امروزی ریسلورهای ترانسمیتر بدون زغال هستند. از نظر ظاهری این ریسلورها ممکن است که شبیه یک موتور الکتریکی کوچک دارای روتور و استاتور باشند. اما از دید داخلی سیم بندی آنها متفاوت است. استاتور ریسلور دارای 3 سیم پیچ است: یک سیم پیچ تحریک و دو سیم پیچ فاز(که معمولا در ریسلورهای بدون زغال با حروف x و y نامیده می شوند). سیم پیچ تحریک در بالا قرار دارد و درحقیقت این سیم پیچ متعلق به یک ترانسفورماتور چرخان است. این سیم پیچ جریان اولیه را بدون اتصال مستقیم الکتریکی به سیم پیچ روتور القای می کند بنابر این محدودیتی در چرخش سیم پیچهای روتور وجود ندارد و به زغال نیز نیازی نمی باشد. سیم پیچ های دیگر در پایین استاتور نصب شده اند و بر روی یک هسته ی ورقه ورقه پیچیده شده اند. آنها 90 درجه ی مکانی با یکدیگر فاصله دارند. روتور دارای یک سیم پیچ است که ثانویه ی یک ترانسفورماتور گردان می باشد و و از نظر الکتریکی از سیم پیچ اولیه جدا است و دو سیم پیچ فاز نصب شده بر روی استاتور را تحریک می کند.
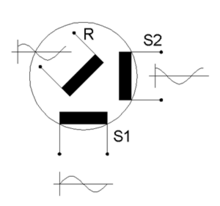
سیم بندی استاتور ریسلور

شکل موج جریان سیم پیچ های استاتور
سیم پیچ اولیه (یا تحریک که بر روی استاتور نصب شده) توسط یک جریان سینوسی تحریک می شود و این جریان را بر روی سیم پیچ روتور القا می کند. جریان سیم پیچ روتور سبب القای جریانی بر روی دو سیم پیچ فاز نصب شده بر روی استاتور می شود. به دلیل اختلاف مکانی 90 درجه ی این دو سیم پیچ دو جریان سینوسی و کسینوسی در آنها ایجاد می شود. اندازه ی نسبی این دو ولتاژ اندازه گیری می شود و برای تعیین زاویه ی نسبی روتور نسبت به استاتور بکار می رود. پس از یک چرخش کامل، این دو موج شکل موج خود را تکرار می کنند. ریسولورها در نمونه های دارای زغال فقط دارای دو سیم پیچ استاتور و روتور هستند.
ریسلور می تواند یک تبدیل دقیق از مختصات قطبی به دکارتی را ایجاد کند. زاویه ی محور می تواند نقش زاویه ی یک بردار در دستگاه قطبی و اندازه ی ولتاژ تحریک می تواند نقش قدرمطلق بردار را بازی کند. خروجی ها عبارتند از طول و عرض در دستگاه دکارتی. ریسلورهایی با چند رتور می توانند دستگاه دکارتی را با قرار دادن محور در زاویه ی مورد علاقه بچرخانند.
ریسلورهای دارای چهار خروجی کامپیوترهای سینوسی/کسینوسی عمومی آنالوگ هستند. هنگامی که آنها با تقویت کننده های الکترونیک و سیم پیچهای فیدبک متصل به سیم پیچ های ورودی استفاده شوند دقت شان بهتر می شود و می توانند به صورت زنجیره ای برای محاسبه ی توابعی با چند جمله ،شاید چند زاویه، بکار روند. مانند محاسبه ی زاویه ی لوله ی توپی که با حرکت های کشتی باید در یک جهت ثابت نشانه گیری شود.
برای ارزیابی موقعیت، ریسلورهای تبدیل کننده به دیجیتال مورد استفاده قرارمی کردند. آنها سینگالهای سینوسی و کسیونوی را به باینری(با پهنای بیت 10 تا 16) تبدیل می کنند و می توانند به سادگی در کنترل کننده ها استفاده شوند.
ریسلور فرستنده
ریسلورها اساسا دو قطبی هستند که بدان معنی است که اطلاعات زاویه ای در آنها عبارت است از زاویه ی مکانیکی استاتور. این نوع می تواند موقعیت زاویه ای قطعی را به دست دهد. انواع دیگر ریسلورها ریسلورهای چند قطبی هستند. آنها دارای 2×p قطب هستند و می توانند p سیکل را در یک چرخش روتور ایجاد کنند. در آنها زاویه الکتریکی برابر است با زاویه ی مکانیکی ضربدر p (که در آن p تعداد جفت قطبها است). بعضی از انواع ریسلور شامل هر دو نوع هستند. یک سیم بندی دو قطبی برای موقعیت و یک سیم بندی چند قطبی برای افزایش دقت در تعیین موقعیت. ریسلورهای دو قطبی معمولا دقتی برابر با 5 دقیقه دارند درحالیکه ریسلورهای 16 قطبی دقتشان به 10 ثانیه می رسد. دقت ریسلورهای 128 قطبی می تواند برابر با 1 ثانیه باشد.
همچنین ریسلورهای چند قطبی ممکن است برای مانیتورینگ موتورهای الکتریکی استفاده شوند. آنها را می توان در هر کاربردی که چرخش یک چیز را نسبت به چیز دیگر اندازه می گیرد ،مانند چرخش آنتن یا در رباتها، بکار برد. در عمل، ریسلورها معمولات به صورت مستقیم به یک موتور الکتریکی متصل می شوند. سیگنالهای فیدبک ریسلور برای چرخشهای مضاعف معمولا به وسیله ی وسایل دیگر مانیتور می شوند. این امر به جبعه دنده های کاهنده اجازه می دهد که بچرخند تا دقت شان بهبود یابد.
به دلیل اینکه توان اعمال شده به ریسلورها کار حقیقی تولدی نمی کند معمولا ولتاژ کمی (کمتر از 24 ولت) به آنها اعمال می کنند. ریسلورها برای مقاصد معمولی با فرکانس 50 یا 60 هرتز و در کشتی ها و هواپیماها با فرکانس 400 هرتز کار می کنند. سیستمهای کنترلی از فرکانسهای بالاتر (5 کیلوهرتز) بهره می برند.
ریسلور گیرنده
ریسلورهای گیرنده به گونه ای متفاوت با ریسلورهای فرستنده (که در بالا درباره شان بحث شد) بکاربرده می شوند. در این ریسلورهای دو سیم پیچ استاتور که با هم 90 درجه اختلاف فاز دارند برقدار می شوند و نسبت بین شکل موج سینوسی و کسینوسی بیانگر زاویه الکتریکی است. این جریانها سبب چرخش روتور می شوند که یک ولتاژ صفر را در سیم پیچ روتور سبب می شوند. در این موقعیت، زاویه ی مکانیکی روتور برابر است با زاویه ی الکتریکی اعمال شده به سیم پیچهای استاتور.
ریسلور تفاضلی
این نوع ریسلور ترکیبی از دو سیم پیچ فاز اولیه،به عنوان گیرنده، و دو سیم پیچ فاز ثانویه، به عنوان فرستنده، می باشد. رابطه ی بین زاویه ی الکتریکی به وسیله ی دو سیم پیچ ثانویه و زاویه ی الکتریکی ثانویه، زاویه ی مکانیکی و زاویه ی الکتریکی اولیه به دست داده می شود. این نوع ،به عنوان مثال، به عنوان یک ماشین حساب توابع مثلثاتی بکاربرده می شود.
یکی دیگر از انواع ریسلور ترانسولور (transolver)است که ترکیبی از سیم پیچهای دوگانه ی ریسلور و سه گانه ی سینکرو را در خود دارد.
مترجم رضاکیانی موحد
منبع
http://en.wikipedia.org/wiki/Resolver_%28electrical%29
یک آی سی برای ساختن نوسانگر
آی سی 8083 یک آی سی جالب است که با اتصال آن به چند قطعه مثل مقاومت و خازن می توان یک نوسانساز با خروجی موج سینوسی، مثلثی یا مربعی تولید کرد. مشخصات این آی سی و چند نمونه از مداراتی که می توان با آن ساخت را در این جا آورده ام.