برق-قدرت
اینجا فقط از برق و الکترونیک و کامپیوتر حرف می زنیمبرق-قدرت
اینجا فقط از برق و الکترونیک و کامپیوتر حرف می زنیمدرباره من
 از کتاب خواندن خیلی لذت می برم و از فیلم دیدن... همین و بس
ادامه...
از کتاب خواندن خیلی لذت می برم و از فیلم دیدن... همین و بس
ادامه...
آمار : 228537 بازدید
Powered by Blogsky
طراحی آسانسور با رویکرد دیجیتال، قسمت اول
عموما کسی که می خواد یه مدار فرمان طراحی کنه اول از پروسه ی مورد نظرش سوال می کنه، بعد که چم و خم کار رو بررسی کردشروع می کنه به طراحی مدار فرمان. بیشتر کار هم به صورت شهودی و بر اساس تجربه صورت می گیره. من در یک سلسله پست (که احتمالا 4 یا 5 قسمت بشه) می خوام طراحی شهودی رو با طراحی دیجیتال مقایسه کنم تا ببینم اگه از اول بر اساس یه مدار منطقی بریم جلو چقدر میتونیم به طراحی یه مدار فرمان خوب نزدیک بشیم.
برای مثال از طراحی آسانسور شروع می کنیم. مدار فرمان آسانسور مدار فرمان نسبتا پیچیده ای هست و به همین دلیل یه قسمتهایی از مدارات رو حذف می کنم تا از هدف اصلی این بحث خیلی دور نیفتم. پس:
- آسانسور ما در هر طبقه دارای یه سنسور هست که نشون دهنده ی وارد شدن آسانسور به طبقاته. از وقتی که آسانسور وارد یه طبقه بشه تا زمانی که به صورت کامل درون اون طبقه قرار بگیره (یعنی در اتاقک آسانسور روبروی در هر طبقه قرار بگیره) اتفاقی نمیافته. وقتی که اتاقک آسانسور کاملا روبروی در خروجی قرار گرفت اون وقته که سنسور اون طبقه فعال می شه. منظورم اینه که ما حالتی نداریم که هیچ یکی از سنسورهای طبقات فعال نباشند و مثلا اتاقک آسانسور بین طبقات باشه. پس یا آسانسور در طبقه اول هست یا دوم یا سوم و ...... اسم این سنسورهای رو میذارم کلید s. فرض می کنیم که این کلیدها همه شون نورمالی اوپن هستند. یعنی وقتی اتاقک آسانسور به یه طبقه برسه سنسورش بسته میشه و وقتی از اون طبقه خارج بشه سنسورش باز میشه.
- برای هر طبقه یه پوش باتون در بیرون اتاقک آسانسور و روی دیوار قرار داره که با فشار دادن اون پوش باتون، اتاقک آسانسور باید در اون طبق توقف بکنه. چون وقتی که پوش باتون ول بشه اطلاعات از بین میره ، پوش باتون رو به یه کنتاکتور وصل می کنیم و از کنتاکتهای اون کنتاکتور استفاده می کنیم به جای خود اون پوش باتون.هر کنتاکتوری برای وصل ماندن از کنتاکت نگه دارنده ی خودش استفاده می کنه. اسم پوش باتونها و کنتاکتورها رو گذاشتمb. به ازای هر پوش باتون در بیرون آسانسور یکی هم داخل خود اتاقک آسانسور هست که موازی با پوش باتون بیرون اتاقک هست ولی من برای ساده تر شدن نقشه اون رو حذفش کردم.
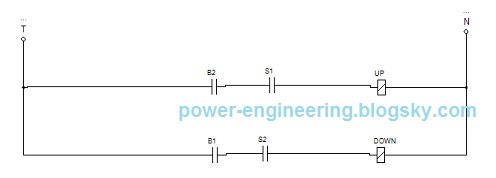
- مدار فرمان آسانسور سه تا فرمان کلی داره: بالا، پایین و توقف. این فرمانها اعمال میشن به یه مدار قدرت چپگرد-راستگرد معمولی که نقشه ش رو میتونید از هر جایی بردارید. یه نمونه ش اینجاست. وقتی که پوش باتون یه طبقه زده بشه اتاقک آسانسور حرکت می کنه تا برسه به اون طبقه. در اونجا سنسور طبقه فعال میشه و فرمان قطع حرکت رو صادر می کنه که در نتیجه باید کنتاکتورهای چپگرد-راستگرد هر دو غیر فعال بشن و از کار بیفتن.
حالا بریم سراغ طراحی یه مدار فرمان در ساده ترین وضعیت یعنی آسانسور برای دو طبقه.
به صورت شهودی میدونیم که اگه اتاقک آسانسور در طبقه ی اول باشه و پوش باتون طبقه ی دوم (b2) فشار داده بشه آسانسور باید بره بالا. از طرفی هم وقتی که اتاقک آسانسور در طبقه ی دوم باشه و پوش باتون طبقه ی اول (b1) فشار داده بشه آسانسور باید بره پایین. پس داریم:
حالا بریم سراغ تحلیل مدار فرمان به روش مدار منطقی (دیجیتال):
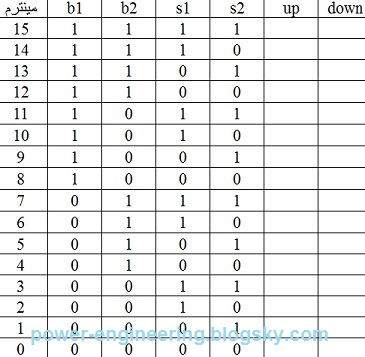
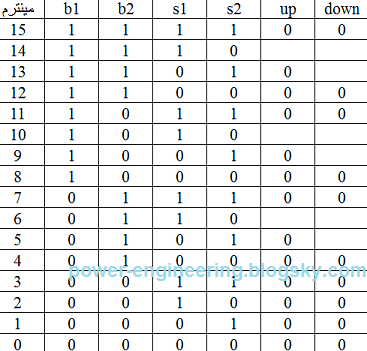
ما 4 تا متغیر داریم که در مجموع 16 حالت رو بوجود میارن. این 16 حالت باید برای ما وضعیت دو تا خروجی رو مشخص بکنن. جدول صحت متغیرها و خروجی ها به صورت زیر هستش:
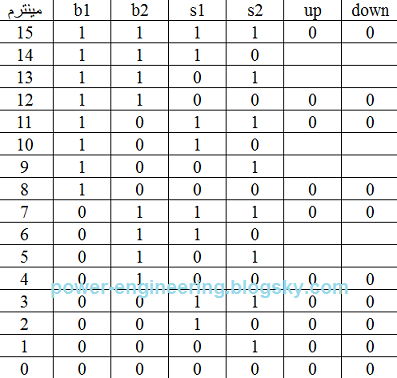
حالا ستونهای up و down رو چه جوری پر بکنیم؟ اول بریم سراغ 4 مینترم آخر. همه رو برای هر دو ستون صفر می کنیم چون اصولا وقتی دکمه های b1 و b2 فشار داده نشده اند نیازی نداره تا آسانسور از جاش تکون بخوره. از طرف دیگه مینترمهایی که s1 و s2 با هم صفر هستند هم توضیح دادیم که غیر ممکن هستند. یعنی ممکن نیست که اتاقک آسانسور توی هیچ کدوم از دو طبقه نباشه. پس اونها رو هم صفر می کنیم. در مینترمهای 7ام ، 11ام و 15ام هم هر دو کلید 1 هستند که غیر ممکنه اتاقک آسانسور همزمان در هر دو طبقه باشه. پس داریم:
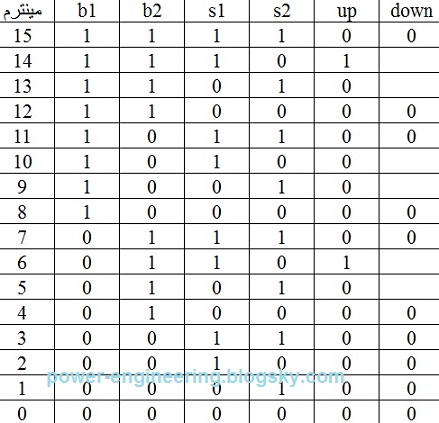
حالا بریم سراغ پر کردن ستون بالا یا up. برای پر کردن این ستون هر جا که کلید s2 وصل هست رو صفر می
کنیم. چرا؟ چون وقتی که کلید s2 وصل هست یعنی اتاقک آسانسور در طبقه ی دوم
هست و چون ساختمون دو طبقه بیشتر نداره پس در این صورت دیگه حرکت آسانسور
به سمت بالا بی معنی می شه. یعنی جدول به صورت زیر در میادش:
در ادامه هر جا که b2 برابر با 1 شده باشه رو در ستون up برابر با 1 قرار می دیم. یعنی پوش باتون b2 فشار داده شده و اتاقک آسانسور در طبقه ی اول هست ودر نتیجه اتاقک آسانسور باید بره بالا. پس داریم:
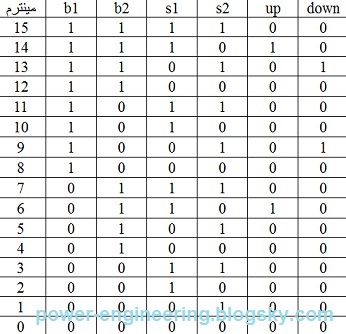
با همین روش ستون پایین یا down رو پر می کنیم با این تفاوت که هر جا s1 فعال بود رو باید صفر کنیم چون یعنی آسانسور در طبقه ی اول هست و پایین رفتنش معنی نداره. بعد هر جا که پوش باتون b1 برابر با 1 بود رو برابر با 1 قرار می دیم. یعنی:
حالا باید جدول زیر رو یه بار با مینترمهای نتیجه شده در دو ستون آخر یه بار برای ستون up و یه بارم برای ستون down پر بکنیم:
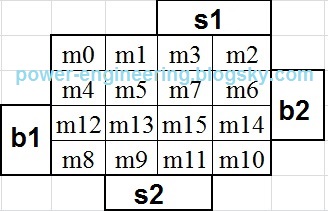
برای ستون up خواهیم داشت:
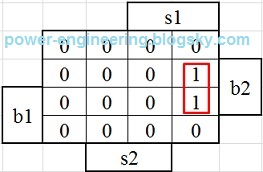
ساده شده ی جدول بالا می شه:
up=s1.s2'.b2
این دقیقا یعنی همون مدار طراحی شده در شکل اول.
جدول ستون down به صورت زیر هستش:
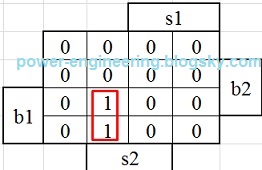
ساده شده ی جدول بالا می شه:
down=s1'.s2.b1
حالا مدار این دو تا خروجی رو که رسم کنیم میشه شکل زیر:
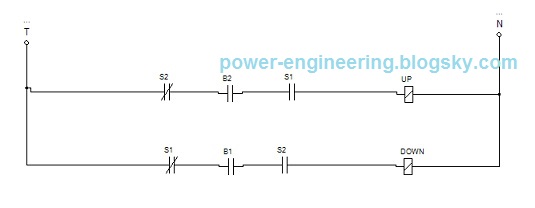
این مدار فرمان در ظاهر با مداری که در ابتدای بحث طراحی کردیم فرق داره. کنتاکت بسته ی کلید s2 به مسیر کنتاکتور up اضافه شده و کنتاکت بسته ی کلید s1 به مسیر کنتاکتور down اضافه شده. ولی اگه دقت کنیم این دو کنتاکت بسته رو میشه حذف کرد و به مدار فرمان اول رسید به این علت که وقتی اتاقک آسانسور توی طبقه ی اول باشه کنتاکت بسته ی s2 همچنان بسته می مونه و بود و نبودش در مدار تفاوتی ایجاد نمیکنه. همین مسئله د رباره ی کنتاکت بسته ی s1 هم صادق هست. یعنی وقتی که اتاقک آسانسور توی طبقه ی دوم باشه این کنتاکت بسته می مونه و بود و نبودش فرقی ایجاد نمیکنه. پس در عمل هر دو مدار هم ارز همدیگه هستند و با طراحی دیجیتال می تونیم به همون مداری برسیم که از روشهای معمولی طراحی مدار فرمان به دست میاد.
بحث رو در قسمت بعدی با طراحی مدار فرمان آسانسور براییه ساختمون سه طبقه ادامه می دیم.
پی نوشت: اگه ساده کردن مدارات منطقی از طریق جدول رو بلد نیستید باید به جلد اول کتاب مدار منطقی موریس مانو مراجعه کنید و به دقت چند فصل اول رو مطالعه کنید.