برق-قدرت
اینجا فقط از برق و الکترونیک و کامپیوتر حرف می زنیمبرق-قدرت
اینجا فقط از برق و الکترونیک و کامپیوتر حرف می زنیمدرباره من
 از کتاب خواندن خیلی لذت می برم و از فیلم دیدن... همین و بس
ادامه...
از کتاب خواندن خیلی لذت می برم و از فیلم دیدن... همین و بس
ادامه...
طراحی آسانسور با رویکرد دیجیتال، قسمت اول
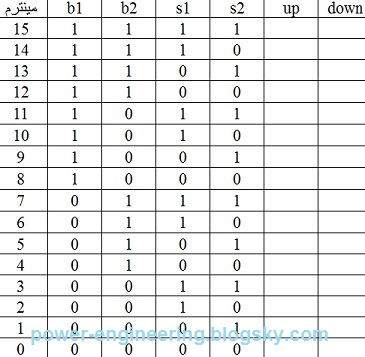
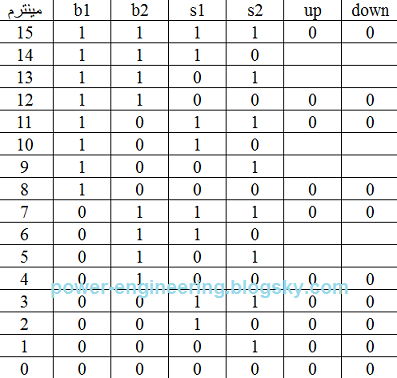
عموما کسی که می خواد یه مدار فرمان طراحی کنه اول از پروسه ی مورد نظرش سوال می کنه، بعد که چم و خم کار رو بررسی کردشروع می کنه به طراحی مدار فرمان. بیشتر کار هم به صورت شهودی و بر اساس تجربه صورت می گیره. من در یک سلسله پست (که احتمالا 4 یا 5 قسمت بشه) می خوام طراحی شهودی رو با طراحی دیجیتال مقایسه کنم تا ببینم اگه از اول بر اساس یه مدار منطقی بریم جلو چقدر میتونیم به طراحی یه مدار فرمان خوب نزدیک بشیم.
برای مثال از طراحی آسانسور شروع می کنیم. مدار فرمان آسانسور مدار فرمان نسبتا پیچیده ای هست و به همین دلیل یه قسمتهایی از مدارات رو حذف می کنم تا از هدف اصلی این بحث خیلی دور نیفتم. پس:
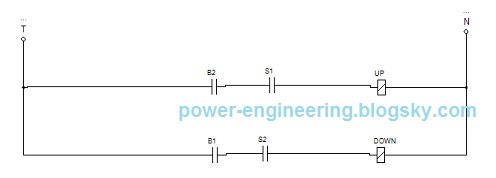
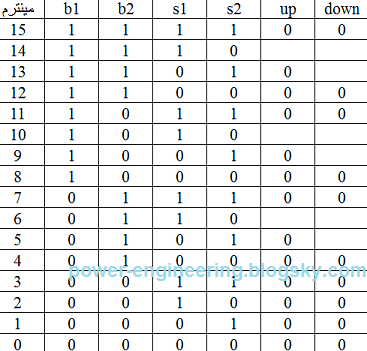
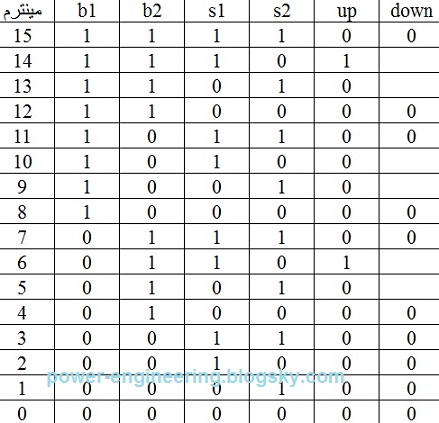
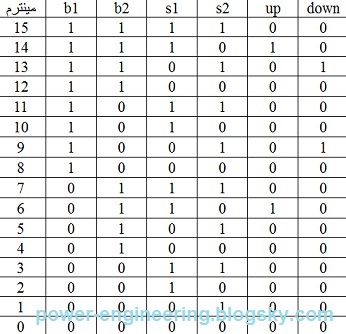
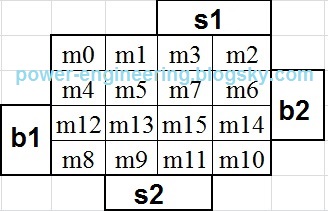
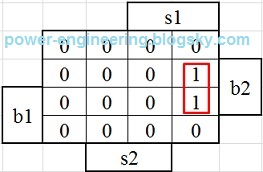
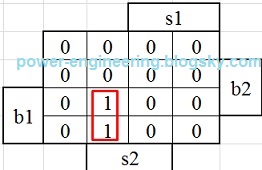
- آسانسور ما در هر طبقه دارای یه سنسور هست که نشون دهنده ی وارد شدن آسانسور به طبقاته. از وقتی که آسانسور وارد یه طبقه بشه تا زمانی که به صورت کامل درون اون طبقه قرار بگیره (یعنی در اتاقک آسانسور روبروی در هر طبقه قرار بگیره) اتفاقی نمیافته. وقتی که اتاقک آسانسور کاملا روبروی در خروجی قرار گرفت اون وقته که سنسور اون طبقه فعال می شه. منظورم اینه که ما حالتی نداریم که هیچ یکی از سنسورهای طبقات فعال نباشند و مثلا اتاقک آسانسور بین طبقات باشه. پس یا آسانسور در طبقه اول هست یا دوم یا سوم و ...... اسم این سنسورهای رو میذارم کلید s. فرض می کنیم که این کلیدها همه شون نورمالی اوپن هستند. یعنی وقتی اتاقک آسانسور به یه طبقه برسه سنسورش بسته میشه و وقتی از اون طبقه خارج بشه سنسورش باز میشه.
- برای هر طبقه یه پوش باتون در بیرون اتاقک آسانسور و روی دیوار قرار داره که با فشار دادن اون پوش باتون، اتاقک آسانسور باید در اون طبق توقف بکنه. چون وقتی که پوش باتون ول بشه اطلاعات از بین میره ، پوش باتون رو به یه کنتاکتور وصل می کنیم و از کنتاکتهای اون کنتاکتور استفاده می کنیم به جای خود اون پوش باتون.هر کنتاکتوری برای وصل ماندن از کنتاکت نگه دارنده ی خودش استفاده می کنه. اسم پوش باتونها و کنتاکتورها رو گذاشتمb. به ازای هر پوش باتون در بیرون آسانسور یکی هم داخل خود اتاقک آسانسور هست که موازی با پوش باتون بیرون اتاقک هست ولی من برای ساده تر شدن نقشه اون رو حذفش کردم.
- مدار فرمان آسانسور سه تا فرمان کلی داره: بالا، پایین و توقف. این فرمانها اعمال میشن به یه مدار قدرت چپگرد-راستگرد معمولی که نقشه ش رو میتونید از هر جایی بردارید. یه نمونه ش اینجاست. وقتی که پوش باتون یه طبقه زده بشه اتاقک آسانسور حرکت می کنه تا برسه به اون طبقه. در اونجا سنسور طبقه فعال میشه و فرمان قطع حرکت رو صادر می کنه که در نتیجه باید کنتاکتورهای چپگرد-راستگرد هر دو غیر فعال بشن و از کار بیفتن.
برق اضطراری با اولویت برق شهر؛ قسمت اول
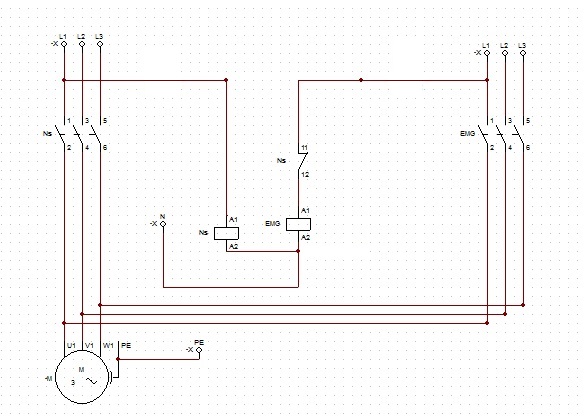
گاهی وقتها مصرف کننده ی حساسی ندارید و قصد دارید تا از یک دیزل ژنراتور به عنوان برق اضطراری استفاده کنید. مدار ساده ی بالا می تواند نیازهای شما را برآورده کند. کنتاکت بسته ی کنتاکتور NSدر مسیر کنتاکتور EMG قرار می گیرد. با قطع برق NS قطع شده و کنتاکت بسته ی آن سبب روشن شدن بوبین EMG و بسته شدن کنتاکتهای قدرت آن میشود. مصرف کننده (که در اینجا یک موتور سه فاز معمولی است) با یک فاصله ی زمانی خیلی کوتاه دوباره برقدار می شود.
توجه به چند نکته درباره ی این مدار ضروری است:
- برای مصرف کننده هایی مثل کامپیوتر(که حافظه ی آنها در صورت قطع لحظه ای برق پاک می شود) باید از UPS استفاده کنید.
- اگر برای موتورهای سه فاز از چنین مداری استفاده می کنید باید جهت چرخش صحیح موتور را پس از وصل شدن برق دیزل ژنراتور حتما چک کنید.
- تیغه های کنتاکتور EMG باید توان تحمل جریان مصرفی را داشته باشند.
- این مدار تنها به قطع شدن یک فاز حساس است و فرضا اگر فازهای 2 یا 3 قطع شوند عکس العملی نشان نمیدهد. برای قطع یک فاز باید از محافظهای دوفاز شدن استفاده کنید.
- هم در مسیر برق شهر و هم برق دیزل ژنراتور باید بسته به توان مصرف کننده از فیوزهای مناسب استفاده شود.
- اولویت در این مدار با برق شهر است. یعنی با وصل مجدد برق شهر مجددا بوبین کنتاکتور NS برقدار شده و دیزل ژنراتور را از مدار خارج می کند.
- برای استفاده از این مدار باید دیزل ژنراتور همیشه روشن باشد. برای اینکه با قطع برق دیزل ژنراتور خودش به صورت خودکار استارت بشود و بعد به مصرف کننده وصل شود باید مدار پیچیده تری طراحی شود.
- این مدار را می توان برای مواردی استفاده کرد که از دو کنتور مجزا بخواهیم برای تأمین برق یک مصرف کننده استفاده کنیم. یعنی به جای دیزل ژنراتور می توانیم یک کنتور دیگر یا اصولا یک تولید کننده ی دیگر داشته باشیم.
- بعضی از مصرف کننده ها هستند که اگر برقشان قطع شد نباید بلافاصله دوباره برقدار بشوند (مثلا لازم است تا ابتدا روغنشان خنک شود یا ....) این مدار برای این مصرف کننده ها مناسب نیستند و باید با اضافه کردن چند مدار ایمنی از برق دار نشدن چنین مصرف کننده هایی مطمئن شویم.
طراحی کلید ریموت/لوکال
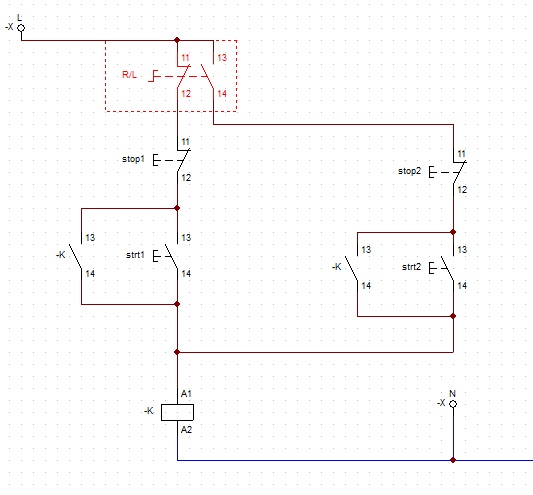
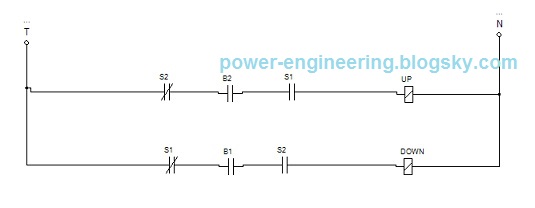
از مسائلی که در طراحی بعضی از دستگاه های صنعتی مطرح می شوند کنترل دستگاه از دو نقطه ی جداگانه است. بسیاری از دستگاه های صنعتی (مثلا کلیدهای قدرت) هم باید به صورت دستی از محل خود دستگاه و هم به صورت از راه دور از اتاق کنترل قطع و وصل بشوند. در این گونه موارد از کلیدهای سلکتور ریموت لوکال مانند تصویر زیر استفاده می شود.

کلید ریموت/ لوکال از نظر عملکرد شباهت زیادی با کلید تبدیل دارد. یک کنتاکت مشترک به ورودی و دو کنتاکت (که همیشه یکی وصل و دیگری قطع است) به خروجی ها وصل می شوند. مدار ساده ای از یک مدار فرمان کنتاکتوری که توسط کلید ریموت/لوکال کنترل می شود در بالا آورده ایم. کلید ریموت/لوکال کلید قرمز رنگ بالای مدار است. دو سیم خروجی آن هر یک به یک جفت کلید استارت/ استپ وصل شده است و در نهایت خروجی آنها به کنتاکتور وصل شده است. زمانی که کلید ریموت/لوکال برق را به شاخه ی سمت راست می دهد شاخه ی سمت چپ کاملا از مدار خارج می شود و برعکس.