برق-قدرت
اینجا فقط از برق و الکترونیک و کامپیوتر حرف می زنیمبرق-قدرت
اینجا فقط از برق و الکترونیک و کامپیوتر حرف می زنیمدرباره من
 از کتاب خواندن خیلی لذت می برم و از فیلم دیدن... همین و بس
ادامه...
از کتاب خواندن خیلی لذت می برم و از فیلم دیدن... همین و بس
ادامه...
ریسلور
بیشتر ریسولور(resolver)های امروزی ریسلورهای ترانسمیتر بدون زغال هستند. از نظر ظاهری این ریسلورها ممکن است که شبیه یک موتور الکتریکی کوچک دارای روتور و استاتور باشند. اما از دید داخلی سیم بندی آنها متفاوت است. استاتور ریسلور دارای 3 سیم پیچ است: یک سیم پیچ تحریک و دو سیم پیچ فاز(که معمولا در ریسلورهای بدون زغال با حروف x و y نامیده می شوند). سیم پیچ تحریک در بالا قرار دارد و درحقیقت این سیم پیچ متعلق به یک ترانسفورماتور چرخان است. این سیم پیچ جریان اولیه را بدون اتصال مستقیم الکتریکی به سیم پیچ روتور القای می کند بنابر این محدودیتی در چرخش سیم پیچهای روتور وجود ندارد و به زغال نیز نیازی نمی باشد. سیم پیچ های دیگر در پایین استاتور نصب شده اند و بر روی یک هسته ی ورقه ورقه پیچیده شده اند. آنها 90 درجه ی مکانی با یکدیگر فاصله دارند. روتور دارای یک سیم پیچ است که ثانویه ی یک ترانسفورماتور گردان می باشد و و از نظر الکتریکی از سیم پیچ اولیه جدا است و دو سیم پیچ فاز نصب شده بر روی استاتور را تحریک می کند.
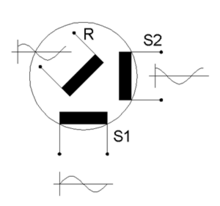
سیم بندی استاتور ریسلور

شکل موج جریان سیم پیچ های استاتور
سیم پیچ اولیه (یا تحریک که بر روی استاتور نصب شده) توسط یک جریان سینوسی تحریک می شود و این جریان را بر روی سیم پیچ روتور القا می کند. جریان سیم پیچ روتور سبب القای جریانی بر روی دو سیم پیچ فاز نصب شده بر روی استاتور می شود. به دلیل اختلاف مکانی 90 درجه ی این دو سیم پیچ دو جریان سینوسی و کسینوسی در آنها ایجاد می شود. اندازه ی نسبی این دو ولتاژ اندازه گیری می شود و برای تعیین زاویه ی نسبی روتور نسبت به استاتور بکار می رود. پس از یک چرخش کامل، این دو موج شکل موج خود را تکرار می کنند. ریسولورها در نمونه های دارای زغال فقط دارای دو سیم پیچ استاتور و روتور هستند.
ریسلور می تواند یک تبدیل دقیق از مختصات قطبی به دکارتی را ایجاد کند. زاویه ی محور می تواند نقش زاویه ی یک بردار در دستگاه قطبی و اندازه ی ولتاژ تحریک می تواند نقش قدرمطلق بردار را بازی کند. خروجی ها عبارتند از طول و عرض در دستگاه دکارتی. ریسلورهایی با چند رتور می توانند دستگاه دکارتی را با قرار دادن محور در زاویه ی مورد علاقه بچرخانند.
ریسلورهای دارای چهار خروجی کامپیوترهای سینوسی/کسینوسی عمومی آنالوگ هستند. هنگامی که آنها با تقویت کننده های الکترونیک و سیم پیچهای فیدبک متصل به سیم پیچ های ورودی استفاده شوند دقت شان بهتر می شود و می توانند به صورت زنجیره ای برای محاسبه ی توابعی با چند جمله ،شاید چند زاویه، بکار روند. مانند محاسبه ی زاویه ی لوله ی توپی که با حرکت های کشتی باید در یک جهت ثابت نشانه گیری شود.
برای ارزیابی موقعیت، ریسلورهای تبدیل کننده به دیجیتال مورد استفاده قرارمی کردند. آنها سینگالهای سینوسی و کسیونوی را به باینری(با پهنای بیت 10 تا 16) تبدیل می کنند و می توانند به سادگی در کنترل کننده ها استفاده شوند.
ریسلور فرستنده
ریسلورها اساسا دو قطبی هستند که بدان معنی است که اطلاعات زاویه ای در آنها عبارت است از زاویه ی مکانیکی استاتور. این نوع می تواند موقعیت زاویه ای قطعی را به دست دهد. انواع دیگر ریسلورها ریسلورهای چند قطبی هستند. آنها دارای 2×p قطب هستند و می توانند p سیکل را در یک چرخش روتور ایجاد کنند. در آنها زاویه الکتریکی برابر است با زاویه ی مکانیکی ضربدر p (که در آن p تعداد جفت قطبها است). بعضی از انواع ریسلور شامل هر دو نوع هستند. یک سیم بندی دو قطبی برای موقعیت و یک سیم بندی چند قطبی برای افزایش دقت در تعیین موقعیت. ریسلورهای دو قطبی معمولا دقتی برابر با 5 دقیقه دارند درحالیکه ریسلورهای 16 قطبی دقتشان به 10 ثانیه می رسد. دقت ریسلورهای 128 قطبی می تواند برابر با 1 ثانیه باشد.
همچنین ریسلورهای چند قطبی ممکن است برای مانیتورینگ موتورهای الکتریکی استفاده شوند. آنها را می توان در هر کاربردی که چرخش یک چیز را نسبت به چیز دیگر اندازه می گیرد ،مانند چرخش آنتن یا در رباتها، بکار برد. در عمل، ریسلورها معمولات به صورت مستقیم به یک موتور الکتریکی متصل می شوند. سیگنالهای فیدبک ریسلور برای چرخشهای مضاعف معمولا به وسیله ی وسایل دیگر مانیتور می شوند. این امر به جبعه دنده های کاهنده اجازه می دهد که بچرخند تا دقت شان بهبود یابد.
به دلیل اینکه توان اعمال شده به ریسلورها کار حقیقی تولدی نمی کند معمولا ولتاژ کمی (کمتر از 24 ولت) به آنها اعمال می کنند. ریسلورها برای مقاصد معمولی با فرکانس 50 یا 60 هرتز و در کشتی ها و هواپیماها با فرکانس 400 هرتز کار می کنند. سیستمهای کنترلی از فرکانسهای بالاتر (5 کیلوهرتز) بهره می برند.
ریسلور گیرنده
ریسلورهای گیرنده به گونه ای متفاوت با ریسلورهای فرستنده (که در بالا درباره شان بحث شد) بکاربرده می شوند. در این ریسلورهای دو سیم پیچ استاتور که با هم 90 درجه اختلاف فاز دارند برقدار می شوند و نسبت بین شکل موج سینوسی و کسینوسی بیانگر زاویه الکتریکی است. این جریانها سبب چرخش روتور می شوند که یک ولتاژ صفر را در سیم پیچ روتور سبب می شوند. در این موقعیت، زاویه ی مکانیکی روتور برابر است با زاویه ی الکتریکی اعمال شده به سیم پیچهای استاتور.
ریسلور تفاضلی
این نوع ریسلور ترکیبی از دو سیم پیچ فاز اولیه،به عنوان گیرنده، و دو سیم پیچ فاز ثانویه، به عنوان فرستنده، می باشد. رابطه ی بین زاویه ی الکتریکی به وسیله ی دو سیم پیچ ثانویه و زاویه ی الکتریکی ثانویه، زاویه ی مکانیکی و زاویه ی الکتریکی اولیه به دست داده می شود. این نوع ،به عنوان مثال، به عنوان یک ماشین حساب توابع مثلثاتی بکاربرده می شود.
یکی دیگر از انواع ریسلور ترانسولور (transolver)است که ترکیبی از سیم پیچهای دوگانه ی ریسلور و سه گانه ی سینکرو را در خود دارد.
مترجم رضاکیانی موحد
منبع
http://en.wikipedia.org/wiki/Resolver_%28electrical%29
سینکرو
به صورت عادی، سیم پیچهای روتور سیم پیچی شده یک موتور القایی پس از راه اندازی موتور اتصال کوتاه می شوند. در طی راه اندازی، ممکن است که مقاومتهایی با این سیم پیچ ها سری شوند تا جریان راه اندازی را محدود کنند. اگر سیم پیچ های روتور دو موتور جدا از هم به وسیله یک مقاومت مشترک راه اندازی متصل شوند، هر دو روتور در طی راه اندازی با هم سنکرون خواهند ماند. پس از راه اندازی، روتورها اتصال کوتاه می شوند و گشتاور راه اندازی ناپدید می شود. استفاده از مقاومتهای بالاتر، گشتاور راه اندازی بیشتری را برای هر دو موتور ایجاد می کند. اگر مقاومتهای راه اندازی از مدار خارج شوند اما رتورها موازی باشند گشتاوری وجود نخواهد داشت. به هرحال، یک گشتاور سنکرون کننده اساسی وجود خواهد داشت. این سیستم یک سینکرو را می سازد که به خاطر خاصیت "خود سنکرونی" آن معروف است.

راه اندازی دو موتور القایی با استفاده از مقاومتهای راه اندازی مشترک
روتورها ممکن است در وضعیت ساکن باشند. اگر یکی از روتورها بچرخد محور روتور دیگر نیز به همان اندازه خواهد چرخید. اگر نیروی مقاومی به یکی از دو روتور اعمال شود این نیرو در هنگام گردش محور روتور دیگر حس خواهدشد. در حالی که سینکروهایی با توان چند کیلووات ساخته شده اند اما سینکرو بیشتر در توانهای پایین و به مقاصد کنترلی ساخته می شود.

سینکرو بدون مقاومت راه اندازی
این سینکروها به منظور چرخش به مانند یک موتور عادی استفاده نمی شوند و به همین دلیل دارای مقاومت راه اندازی نیستند. از آنجا که روتورها اتصال کوتاه نشده اند و مقاومتهای راه اندازی هم وجود ندارند هیچ گشتاور راه اندازی در سینکرو بوجود نمی آید. به هر حال، گردش دستی یکی از محورها یک جریان غیرمتعادل در روتورها بوجود می آورد که تا چرخیدن محور دیگر ادامه خواهد داشت. توجه داشته باشید که یک منبع ولتاژ 3 فاز به هر دو استاتور متصل شده است. در زیر به شرح سینکروی تکفاز خواهیم پرداخت.
فرستنده-گیرنده
سینکروهای کوچک از روتورهای تک فاز موازی شده با هم و استاتورهای موازی استفاده می کنند که این استاتورها به هیچ منبع ولتاژی متصل نیستند. سینکروها مانند یک ترانسفورماتور چرخان عمل می کنند. اگر هر دو روتور فرستنده (TX) و گیرنده (RX) در یک زاویه قرار داشته باشند ولتاژی که به استاتورها القا می شوند برای هر دو موتور یکسان خواهد بود و در نتیجه جریانی بین آنها ایجاد نخواهدشد. اگر فقط یکی از روتورها بچرخد و دیگری ثابت باشد، ولتاژ القاشده بین استاتور فرستنده و گیرنده تفاوت خواهد داشت. این تفاوت ولتاژ جریانی را ایجاد می کند که گشتاوری را در روتور دومی ایجاد خواهد کرد. محور گیرنده از نظر الکتریکی و مکانی نسبت به محور فرستنده تبعیت خواهد داشت. چرخش هر یک از محورها چرخش محور دیگر را در پی خواهد داشت.

سینکرو به همراه روتور تک فاز
استاتورها به ترمینالهای خارجی وصل شده اند. سیم پیچی تکفاز روتورها توسط زغال به منبع ولتاژ متصل می شوند. فرستنده و گیرنده از نظر الکتریکی شبیه به هستند اما گیرنده دارای یک دمپر اینرسی است. به هرحال، ممکن است که یک فرستنده را به جای گیرنده بکارگرفت.
بزرگترین کاربرد سینکرو در سنسورهای موقعیت از راه دور است. برای مثال یک سینکروی فرستنده می تواند به محور یک فرستنده رادار وصل شود تا جهت آنتن توسط گیرنده ای که در اتاق فرمان نصب شده است نمایش داده شود. اگر یک فرستنده به یک بادنما متصل شوند می تواند جهت باد را از راه دور نشان دهد. سینکروها با ولتاژ های 26 تا 240 ولت و فرکانسهای 50 تا 400 هرتز در بازار موجود هستند.

سینکرو به عنوان نمایشگر جهت از راه دور
فرستنده-گیرنده تفاضلی
یک فرستنده سینکروی تفاضلی (TDX) دارای روتور و استاتور سه فاز است. یک فرستنده سینکروی تفاضلی یک زاویه مکانی ورودی را به یک زاویه الکتریکی در ورودی های روتورش اضافه می کند و جمع هر دو را در خروجی استاتورش ظاهر می کند. این زاویه الکتریکی روتور می تواند با ارسال به یک گیرنده نمایش داده شود. به عنوان مثال، یک گیرنده ی متصل به فرستنده می تواند موقعیت آنتن رادار را نسبت به محور طولی کشتی نمایش دهد. اما اضافه کردن یک فرستنده سینکروی تفاضلی به ژیروسکوپ کشتی سبب می شود تا گیرنده جهت واقعی آنتن رادار را نسبت به شمال جغرافیایی ،فارغ از زاویه محور طولی کشتی، نشان دهد. جابجا کردن سرهای S1-S3در استاتورها فرستنده و گیرنده سبب می شود تا تفاضل بین دو زاویه اندازه گیری شود.

فرستنده سینکروی تفاضلی
یک رادار متصل شده به فرستنده می تواند زاویه آنتن را نسبت به محور طولی کشتی نشان دهد. اما آنچه مورد نیاز است این است که جهت آنتن با توجه به شمال حقیقی نمایش داده شود. ما نیاز داریم تا با استفاده از یک ژیروسکوپ متصل شده به فرستنده تفاضلی زاویه آنتن را نسبت به شمال جغرافیایی نشان دهیم.

اضافه کردن فرستنده تفاضلی به سینکرو جهت نمایش شمال واقعی
∠antenna-N = ∠antenna + ∠gyro
∠rx = ∠tx + ∠gy
به عنوان مثال، اگر زوایه محور طولی کشتی 30 درجه باشد و زاویه آنتن رادار نسبت به محور کشتی صفر باشد آن وقت زاویه آنتن نسبت به شمال جغرافیایی می شود:
∠rx = ∠tx + ∠gy
∠30o = ∠30o + ∠0o
یا اگر زوایه محور طولی کشتی 30 درجه باشد و آنتن رادار نسبت به محور طولی کشتی 15 درجه زاویه داشته باشد زاویه آنتن نسبت به شمال جغرافیایی می شود:
∠45o = ∠30o + ∠15o
جمع در برابر تفریق
به عنوان مرجع، ما مدارات جمع کننده و تفریق کننده را برای فرستنده و گیرنده تفاضلی آورده ایم. فرستنده تفاضلی دارای یک ورودی زاویه ی مکانی بر روی محور، یک ورودی زوایه ی الکتریکی و یک استاتور سه فاز به همراه یک خروجی زاویه ی الکتریکی با سه خروجی بر روی روتور می باشد. گیرنده تفاضلی دارای یک ورودی زاویه ی الکتریکی در استاتور و یکی در روتور می باشد. خروجی آن یک تغییر زاویه مکانی بر روی محور گیرنده تفاضلی است. تفاوت این دو در این است که فرستنده تفاضلی فرستنده تغییر مکان است و گیرنده تفاضلی گیرنده ی آن.

تفریق کننده با استفاده فرستنده تفاضلی
در تصویر بالا گشتاور ورودی به فرستنده و فرستنده تفاضلی اعمال می شود و گشتاور خروجی تفاضل زاویه محورهای فرستنده و فرستنده تفاضلی هستند.

جمع کننده با استفاده فرستنده تفاضلی
در تصویر بالا گشتاور ورودی به فرستنده و فرستنده تفاضلی اعمال می شود و گشتاور خروجی مجموع زوایای آن دو هستند که در خروجی ظاهر می شود.

تفریق کننده با استفاده از گیرنده تفاضلی
در تصویر بالا گشتاور ورودی به دو فرستنده وارد می شود و تفاضل ورودی ها در گیرنده تفاضلی ظاهر می شود.

جمع کننده با استفاده از گیرنده تفاضلی
در تصویر بالا گشتاور ورودی به دو فرستنده وارد می شود و جمع ورودی ها در گیرنده تفاضلی ظاهر می شود.
ترانسفورماتور کنترلی
یکی از کاربردهای فرستنده سینکرو ترانسفورماتور کنترلی است. این تجهیز مانند فرستنده سینکرو دارای سه سیم پیچ استاتور است. سیم پیچ روتور فرستنده کنترلی دارای تعداد دور بیشتری نسبت به یک فرستنده یا گیرنده ی معمولی است تا آن را برای کشف کردن صفر در زمان چرخش ، که نوعا در سروموتورها بکار می رود ، حساس تر کند. زوایه خروجی روتور ترانسفورماتور کنترلی هنگامی که در زوایه ی برابر با بردار میدان مغناطیسی استاتور قرار بگیرد صفر خواهد شد. برخلاف سینکروی فرستنده و گیرنده، ترانسفورماتور کنترلی هیچ گشتاوری را انتقال نمی دهد. این تجهیز به سادگی یک سنسور حساس برای کشف اختلاف زاویه است.

ترانسفورماتور کنترلی برای کشف صفر سرو
در تصویر بالا محور فرستنده در زاویه ای که می خواهیم آنتن رادار در آن جهت قرار بگیرد تنظیم شده است. سیستم سرو سبب می شود تا سروموتور به محلی که مورد نظر ما است تغییر مکان بدهد. ترانسفورماتور کنترلی موقعیت تنظیم شده و موقعیت واقعی آنتن را مقایسه می کند و سیگنالی ایجاد می کند که توسط تقویت کننده تقویت شده و به موتور سرو اعمال می شود تا آنتن به زاویه مورد نظر ما تغییر مکان دهد.

ترکیب سروموتور و ترانسفورماتور کنترلی برای کشف محل آنتن
هنگامی که ترانسفورماتور کنترلی صفر را در زاویه 90 درجه الکتریکی نسبت به محور میدان استاتور کشف کند هیچ خروجی در روتور ظاهر نمی شود. هر جابجایی رتور یک ولتاژ خطای متناوب متناسب با مقدار جابجایی ایجاد می کند. در نتیجه، موتور سرو چرخش می کند تا خطای بین فرمان و مقدار اندازه گیری شده توسط فیدبک منفی را به حداقل برساند. ترانسفورماتور کنترلی زاویه محور را با زاویه میدان استاتور،فرستاده شده توسط استاتور فرستنده، مقایسه می کند. هنگامی که ترانسفورماتور کنترلی حداقل یا صفر را اندازه گیری می کند موتور سرو آنتن و روتور ترانسفورماتور کنترلی را به موقعیت تنظیم شده می چرخاند. اگر سیگنال خطایی بین مقدار اندازه گیری شده و موقعیت اندازه گیری شده وجود نداشته باشد در خروجی ترانسفورماتور کنترلی سیگنالی ظاهر نخواهدشد و سرو موتور از چرخش بازمی ایستد. به هرحال، هر خطایی که توسط ترانسفورماتور کنترلی کشف شود به ورودی تقویت کننده اعمال می شود و سرو موتور را تا زمانی که خطا به حداقل برسد می چرخاند. این ارتباط به سرو، آنتن متصل شده به ترانسفورماتور کنترلی را می چرخاند تا زاویه آن با زاویه تنظیم شده توسط فرستنده برابر شود.
سروموتور ممکن است یک چرخدنده کاهنده را بگرداند و نسبت به فرستنده و ترانسفورماتور کنترلی بزرگتر باشد. به هرحال، بازده اندک سروموتورها آنها را برای بارهای کوچک نامناسب می سازد. در ضمن کنترل سروموتورها به دلیل اینکه با سرعت ثابت می چرخند دشوار است. اما با کنترل یک فاز نسبت به فاز دیگر می توان آنها را در بسیاری موارد بکارگرفت. بارهای بزرگ با کارایی بیشتری توسط سروموتورهای دی.سی به گردش در می آیند.
سیستمهای کنترلی در هواپیماها و هلیکوپترها از فرستنده، ترانسفورماتور کنترلی و سروموتورهایی با فرکانس نامی 400 هرتز استفاده می کنند. اندازه و وزن قطعات مغناطیسی با ولتاژ متناوب با فرکانس آنها نسبت معکوس دارد. بنابراین، استفاده از فرکانس 400 هرتز در هواپیماها سبب می شود تا از موتورهای کوچکتر و سبکتر استفاده شود.
برطرف کننده
یک برطرف کننده (تصویر پایین) دارای دو سیم پیچ استاتور با زوایه 90 درجه نسبت به یکدیگر می باشد و یک روتورسیم پیچی شده که توسط جریان متناوب تغذیه می گردد. یک برطرف کننده برای تبدیل دستگاه قطبی به دکارتی مورد استفاده قرار می گیرد. یک زاویه ورودی در محور روتور یک ولتاژ متناسب سینیوسی یا کسینوسی در سیم پیچهای استاتور القا می کند.

برطرف کننده زاویه محور را به سینوس یا کسینوس زاویه محور تبدیل می کند.
به عنوان مثال، یک رادار فاصله آنتن رادار تا هدف را به وسیله یک موج سینوسی متناسب با ولتاژ ، با استفاده از زاویه آنتن به عنوان زاویه محور روتور، رمز گذاری می کند. موج سینوسی روتور برطرف کننده را تغذیه می کند. محور آنتن هم از نظر مکانیکی با محور برطرف کننده کوپل شده است. مختصات دکارتی بر روی سیم پیچ های استاتور برطرف کننده قابل دستیابی هستند:
X=V(cos(∠bearing))
Y=V(sin(∠bearing))
مختصات دکارتی را می تواند بر روی یک نقشه نشان داد.

ترکیب بندی اسکات-تی با تبدیل 3 فاز به 2 فاز سبب می شود تا بتوان یک سینکروی فرستنده را به جای برطرف کننده بکارگرفت.
ممکن است که یک تجهیز شبیه به برطرف کننده را با استفاده از ترکیب یک فرستنده سینکرو و ترانسفورماتور اسکات-تی (شکل بالا) درست کرد. خروجی های سه فاز فرستنده توسط ترانسفورماتور اسکات-تی به خروجی دو فاز تبدیل می شود.
در ضمن یک نمونه خطی برطرف کننده نیز در بازار موجود است که اینداکتوسین نام دارد. نمونه چرخنده اینداکتوسین عملکرد بهتری از برطرف کننده عادی دارد.
مترجم رضاکیانی موحد
منبع
http://www.allaboutcircuits.com/vol_2/chpt_13/11.html