برق-قدرت
اینجا فقط از برق و الکترونیک و کامپیوتر حرف می زنیمبرق-قدرت
اینجا فقط از برق و الکترونیک و کامپیوتر حرف می زنیمدرباره من
 از کتاب خواندن خیلی لذت می برم و از فیلم دیدن... همین و بس
ادامه...
از کتاب خواندن خیلی لذت می برم و از فیلم دیدن... همین و بس
ادامه...
چگونه یک کامپیوتر آنالوگ بسازیم؟
Jake Schneider Erik Welsh Brandon Baysinger Parker Jones
مترجم:رضاکیانی موحد
مقدمه
به منظور فهم بهتر دنیای فیزیک، بعضی وقتها لازم است که از مدلهای ریاضی برای پیش بینی عکس العملهای سیستمهای فیزیکی ،مانند وزنه ای که در انتهای یک فنر نوسان می کند، استفاده کنیم. به خاطر استفاده از معادلات دیفرانسیل، ممکن است که رفتار یک مدل این چنین را دقیقا مدلسازی کرد. به هرحال، دیدن پاسخهای گرافیکی جواب چنین مدلهایی پیچیده است. کامپیوترهای آنالوک به دلیل استفاده از ضرب کننده ها، جمع کننده ها و انتگرال گیرها می توانند به سرعت و با دقت پاسخ معادلات دیفرانسیل را ترسیم کنند.
خلاصه
به منظور مدل سازی نیروها، نوسان میرای یک وزنه ی آویخته به یک فنر ما یک کامپیوتر آنالوک با استفاده از جمع کننده و انتگرال گیر ساخته ایم تا با حل معادله دیفرانسیل زیر:
بتوانیم پاسخ سیستم را به موجهای سینوسی، مثلثی و مربعی در فرکانسهایی بین 2 تا 2 مگاهرتز تعیین کنیم. برای ساخت این کامپیوتر دو مدار را طراحی کرده ایم. هر دو مدار معادله ی دیفرانسیل یکسانی را حل می کنند اما مدار دوم بسیار بهتر از مدار اول است.
بررسی ریاضی
مدلسازی حرکت میرای یک سیستم فنر-وزنه بر حل معادله ی دیفرانسیل زیر استوار است:
![]()


که در این معادله M وزن وزنه ی متصل شده به فنر، Kd ثابت میرایی، Ks ثابت فنر و F(t) نیروی وارد شده می باشد. به منظور حل این معادله ابتدا باید معادله ی همگن حل شود تا پاسخ های طبیعی سیستم بدست آیند. حل معادله ی همگن به دست می دهد:
![]()
پس از آن باید به دنبال جوابهای خاص معادله ی اصلی بگردیم. با استفاده از تبدیل لاپلاس معادله را برای بدست آوردن xL(s) حل می کنیم:
![]()
و با تبدیل لاپلاس معکوس می توانیم به x(t) برسیم. با حل این انتگرال پاسخ معادله ی دیفرانسیل مدلسازی فنر-وزنه به دست می آید:

یا می توان از یک کامپیوتر آنالوگ برای رسیدن به جواب استفاده کرد.
انتگرال گیر
یکی از مشکلاتی که قبل از ساختن هر مداری با آن مواجه می شویم روش ساخت یک انتگرال گیر قابل اعتماد است. در ابتدا ما سعی کردیم تا از یک خازن برای فیدبک انگرال گیر استفاده کنیم. انتگرال گیر شامل یک مقاومت ورودی (10 کیلو تا 1 مگا اهم)، و یک خازن فیدبک (0.1 میکروفاراد) و یک تقویت کننده ی عملیاتی LM741 می باشد. در این مورد، انتگرال گیر خروجی را با نسبت -1/RCs ورودی تقسیم می کند (s فرکانس ورودی است). یکی از مشکلات چنین انتگرال گیری عدم توانایی آن در نگه داشتن یک شکل موج برای بیشتر از یک زمان مشخص است. انتگرال گیر شکل موج را هنگامی که یک موج مربعی به ورودی اعمال شود بیشتر نگه می دارد تا زمانی که ورودی سینوسی باشد. همچنین، مقاومت بیشتر در ورودی سبب می شود که انتگرال گیر بیشتر شکل موج را نگه دارد. مداری این چنین دارای یک خازن 0.1 میکروفاراد و یک مقاومت ورودی 1 مگااهم است. این مدار می تواند شکل موجهای زیر را برای زمانهای زیر نگه دارد:
|
شکل موج |
زمان نگهداری(ثانیه) |
|
مربعی |
47 |
|
مثلثی |
18 |
|
سینوسی |
10 |
(فرکانس تمام موج ها 130 هرتز است)
انتگرال گیر نمی تواند شکل موج را نگه دارد چرا که فانکشن ژنراتور ما برای هیچ کدام از سیگنالها خروجی صفر نداشت. اگر این طور نبود انتگرال گیر ما بهتر عمل می کرد.
از این رو، ما سعی کردیم یک مدار بهتر بسازیم و آن را انتگرال گیر با فیدبک موازی نامیدیم. این مدار دارای یک مقاومت موازی با خازن فیدبک بود. شکل موج خروجی بسیار پایدارتر بود. بدین منظور ما از یک مقاومت 10مگااهم به عنوان ورودی و از یک مقاومت 5.1 مگااهم به موازات خازن 0.1 میکروفاراد استفاده کردیم. در نتیجه تابع انتقال تبدیل شد به
-RF / (RF*R*C*s + R)
که در این تابع RF مقاومت فیدبک و R مقاومت ورودی است:
انتگرال گیر ساده
انتگرال گیر با مقاومت در فیدبک
با به دست آوردن یک مدار پایدار، مدلسازی معادله را با مدارات بزرگتر دنبال کردیم.
طراحی اولین کامپیوتر
ما در اولین طرح خود سعی کردیم که مستقیما از مداری که داشتیم ،بدون کوچک کردن آن، استفاده کنیم. دراینجا بلوک دیاگرام مدار آمده است:
و در اینجا نقشه ی مدار ساخته شده را می بینید:
زمانی که این مدار را ساختیم با اشکالات چندی مواجه شدیم که ما را به ساده تر کردن مدار هدایت کرد. بزرگترین مسئله به خاطر تعداد زیاد تقویت کننده های عملیاتی بود که مدار را مستعد نویز کرده بود. هر جزء مدار به صورت جداگانه نویز زیادی نداشت اما در کنار هم میزان نویز تقویت شده توسط هر جزء مدار بیشتر و بیشتر می شد. همچنین این نویز سبب می شد تا ایجاد یک شکل موج پایدار با مشکل مواجه شود. آفست دی.سی فانکشن ژنراتور باید برای هر شکل موج ورودی به صورت جداگانه تنظیم شود تا خروجی پایدار شود. اگر آفست دی.سی حتی مقدار اندکی از مقدار مورد نیاز منحرف شود خروجی به سرعت تبدیل به یک مقدار دی.سی تبدیل می شود.
به خاطر تأثیر زاید نویز (همانطور که در بخش بعدی خواهیم گفت) تصمیم گرفتیم تا مدار را خلاصه کنیم.
پاسخ مدار اصلی به ورودی های گوناگون
تمام شکل موج های ورودی زیر با دامنه و فرکانس یکسان (100 هرتز) به مدار اعمال شده اند. در تمام دیاگرامهای زیر ورودی با رنگ آبی و خروجی با رنگ سبز مشخص شده اند:
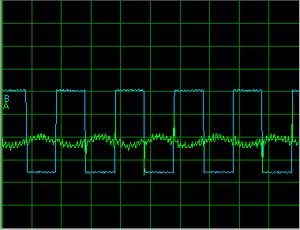
موج مربعی
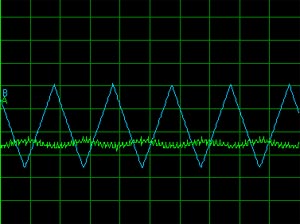
موج مثلثی
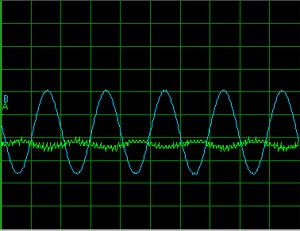
موج سینوسی
توجه کنید که در تمامی خروجی ها اثرات نویز به خوبی قابل مشاهده است. تمام شکل موجهای خروجی نوسانهای مشخص ناشی از نویز را نشان می دهند. همچنین می توان توجه کرد که شکل موج های خروجی ،فارغ از ورودی اعمال شده، بسیار شبیه هستند. همچنین این مدار پاسخ بزرگتری ،دست کم در دامنه، برای موج مربعی نسبت به موج سینوسی یا مثلثی دارد.
طرح کامپیوتر دوم
پس از تحقیق و کار عملی مدار خلاصه شده ی کامپیوتر تهیه شد. به جای استفاده از جمع کننده ها، تقویت کننده و انتگرال گیرهای جداگانه از جمع کننده-انتگرال گیر استفاده کردیم. این امر اجازه داد تا تعداد زیادی از عناصر را حذف کنیم. در اینجا بلوک دیاگرام مدار دومی که ساختیم را می بینید:
در زیر مدار ساخته شده را می بینید. توجه کنید که تعداد عناصر مدار چقدرکمتر شده اند. بنابراین امکان وارد شدن نویز به مدار کمتر شده است.
در این مدار از 3 تقویت کننده ی عملیاتی استفاده شده است. 2 تقویت کننده برای انتگرال گیری و جمع و یکی به عنوان معکوس کننده استفاده شده اند. ثابتهای معادله ی دیفرانسیل مدل شده نمی توانند به صورت مجزا تنظیم شوند. در عوض، 4 پتانسیومتر اجازه می دهند که نسبتهای بین آنها تنظیم شود.
این مدار پاسخ بهتری نسبت به ورودی اعمال شده دارد. با این مدار مشکل نویز در مدار قبلی حل شده است. همچنین، ناچار نیستیم تا آفست دی.سی فانکشن ژنراتور را برای رسیدن به نتیجه تنظیم کنیم. با روشن کردن مدار بلافاصله شکل موج خروجی ظاهر می شود.
پاسخ مدار دوم به شکل موجهای ورودی
در زیر شکل موجهای ورودی با رنگ سبز و خروجی ها با رنگ آبی نمایش داده شده اند:
موج مربعی 1 هرتز
موج مربعی 10 هرتز
موج مربعی 100 هرتز
موج مربعی 1000 هرتز
موج مثلثی 100 هرتز
موج سینوسی 100 هرتز
اثرات نویز به مقدار زیادی کم شده اند. شکل موج خروجی دیگر نوسان آنچنانی (مانند مدار اول) ندارد. توجه کنید که چگونه شکل موج خروجی در هر مورد سعی می کند که (بر خلاف مدار اول) شکل موج ورودی را به خود بگیرد. همچنین به شیفت فازی بوجود آمده در مورد ورودی های سینوسی و مثلثی توجه کنید.
بحث
خروجی مدار اول آنچنان که انتظار داشتیم نبود. توجه کنید که ورودی های زیادی برای اعمال نویز به مدار وجود داشت و خروجی به شدت از نویز تأثیر گرفته بود. شکل موج های خورجی خیلی بزرگ نبودند و در اثر نویز اعوجاج داشتند.
درباره ی شکل موجهای خروجی مدار دوم می توان بیشتر بحث کرد. خروجی سعی می کرد که شکل موج ورودی را به خود بگیرد. این امر در فرکانس 1 هرتز با موج مربعی بیشتر قابل توجه است. توجه کنید که چگونه شکل موج خروجی نمی تواند کاملا با شکل موج ورودی هماهنگ شود. هنگامی که موجهای سینوسی و مثلثی به مدار اعمال شوند این عدم توانایی با تغییر فاز نسبت به ورودی خود را نشان می دهد. در هر مورد، با افزایش فرکانس تأثیر تغییر فاز بر روی خروجی افزایش می یابد. کامپیوتری که ما از آن برای ترسیم شکلها استفاده کردیم نمی توانست با سرعت کافی نمونه برداری کند اما عکس العمل مدار در برابر فرکانس 2 مگاهرتز مربعی واقعا جالب توجه بود. در این فرکانس خروجی فانکشن ژنراتور کاملا اعوجاج داشت. جالب است که در خروجی نیز اعوجاج زیادی دیده می شود که ناشی از این است که مدار سعی می کند تا خود را با ورودی مطابقت دهد.
تغییر فاز و عدم توانایی تطابق با ورودی را می توان با روشهای گوناگونی تشریح کرد. در دنیای فیزیک می توان این شیفت را به عنوان اینرسی وزنه ی آویخته شده به فنر محسوب کرد. با تغییر مقدار ورودی وزنه نمی تواند همزمان تغییر وضعیت بدهد. به خاطر اینرسی وزنه ابتدا باید حرکت خود را به انتها برساند و پس از در جهت دیگر حرکت کند. در نظریه ی سیستمها این تغییر فاز به سادگی ناشی از مدار است. مدار کاملا خطی نیست و این امر اختلالی در هر شکل موج ورودی که اعمال شود ایجاد می کند.
نتیجه گیری
پس از تنظیم مدار فهمیدیم که یک کامپیوتر آنالوک راه حل مؤثری برای حل معادلات دیفرانسیل ارائه می دهد. کامپیوترهای آنالوگ دقتی مشابه کامپیوترهای دیجیتال ندارند اما برای حل معادلات دیفرانسیل به صورت غیرقابل باوری سریع هستند. به خاطر اینکه کامپیوترهای آنالوگ تمام معادله را در یک لحظه حل می کنند ما می توانیم فرکانس یا شکل موج تابع نیرو را عوض کنید و بدون تأخیر پاسخ را ببینیم. به هرحال، این کامپیوترها چند نقطه ضعف هم دارند. تنظیم شرایط اولیه ی یک معادله ی دیفرانسیل برای آنها سخت است چرا که به یک منبع ولتاژ شناور که بتواند به سرعت از مدار جداشود نیاز دارد. همچنین، صفر کردن آفست دی.سی خروجی به وسیله ی فانکشن ژنراتور مشکل زاست. در انتها، کامپیوترهای آنالوگ راه مؤثری برای حل کردن یک مدل فیزیکی واقعی هستند.
منبع
https://www.clear.rice.edu/elec301/Projects99/anlgcomp/
زمین کردن حفاظتی در سازه های دریایی
رضاکیانی موحد
در تمام تأسیساتی که دارای تجهیزات الکتریکی می باشند (از جمله سازه های دریایی مانند سکوهای نفتی) زمین کردن یکی از مهمترین و اساسی ترین اقداماتی است که برای رفاه سلامت کارکنانی که با این تأسیسات در تماس هستند انجام می پذیرد.
به صورت کلی در تأسیسات صنعتی دو نوع زمین کردن وجود دارد:
1. زمین کردن حفاظتی
2. زمین کردن الکتریکی
زمین کردن حفاظتی عبارت است از زمین کردن بدنه ی فلزی تجهیزات که در ارتباط مستقیم با مدارات الکتریکی داخلی آنها قرار ندارند. بدین سان اگر اتصالی بین مدارات الکتریکی و بدنه ی دستگاه روی دهد زمین کردن سبب اتصال کوتاه در مدار الکتریکی و قطع منبع ولتاژ توسط مدارات حفاظتی (فیوزها، مدارشکنها و غیره) خواهدشد. اگر تجهیزی به صورت اصولی زمین شده باشد و اتصال بدنه در آن روی بدهد در صورتی که کاربر با بدنه ی آن تجهیز مستقیما برخورد داشته باشد زمین کردن حفاظتی از برق گرفتگی وی جلوگیری خواهدکرد.
زمین کردن الکتریکی یعنی زمین کردن نقطه هایی از تجهیزات الکتریکی که جزئی از مدار الکتریکی می باشند مانند زمین کردن نقطه ی ستاره در ترانسفورماتورها، موتورها و ژنراتورها. این زمین کردن به منظور ادامه ی کار صحیح تجهیزات الکتریکی صورت می پذیرد و از بحث فعلی ما خارج می باشد.
در حقیقت آنچه که منظور این مقاله است، نوع اول زمین کردن یا زمین کردن حفاظتی در سازه ها و تأسیسات دریایی ، از قبیل سکوهای نفتی، می باشد.
در حالت عادی ،که تأسیسات و کارخانجات بر روی زمین قرار دارند، برای زمین کردن حفاظتی ابتدا مقاومت الکتریکی خاک اندازه گیری می شود و پس از آن با توجه به مقاومت الکتریکی خاک یک یا چند چاه حفر می شود. این گونه چاه ها "چاه ارت" نامیده می شوند و ارتفاع آنها بسته به نوع طراحی چاه متفاوت می باشد. در درون این چاه یک صفحه ی بزرگ فلزی یا یک الکترود (میله ی) بلند فلزی قرار می گیرد که به سیمی متصل می شود که از چاه ارت بیرون می آید.
در مرحله ی بعدی این چاه ها به همدیگر متصل شده و تشکیل یک شبکه از چاه ها را می دهند. مقاومت کلی چاه (یا چاه های) ارت باید در خانه های مسکونی کمتر از 5 اهم و در کارخانجات کمتر از 2 اهم باشد.

تصویر1: میله ی ارت که تجهیز را به صورت منفرد زمین کرده است.
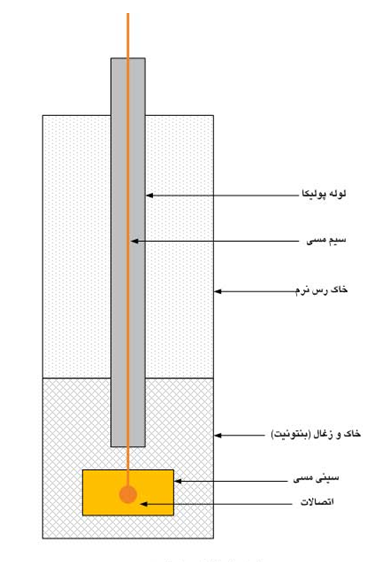
تصویر2: یک نمونه از چاه ارت
در انتها، تمامی تجهیزات الکتریکی موجود در سایت یا کارخانه به وسیله ی سیم های ضخیم مسی (سیم زمین یا سیم ارت) به این چاه های ارت متصل می شوند. لازم به ذکر است که میله های برقگیر (در مناطقی که برای حفاظت از تأسیسات در برابر صاعقه نیاز به نصب آنها می باشد) و سیمهای گارد خطوط انتقال نیرو نیز برای حفاظت در برابر صاعقه به چنین چاه هایی متصل می شوند.
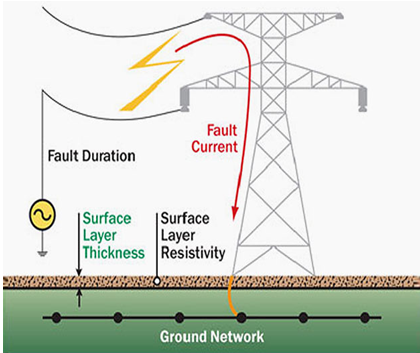
تصویر3:انتقال جریان اتصال کوتاه توسط پایه های دکل انتقال قدرت به شبکه ی زمین
در تأسیسات دریایی (سکوهای نفتی، سکوهای گازی، سکوهای حفاری و غیره) از آنجا که حفر چاه ارت در کف دریا غیرممکن می باشد به ناچارا از پایه های خود سکو به عنوان چاه ارت استفاده می شود.
به منظور زمین کردن تجهیزات مستقر در سکو ابتدا یک حلقه ی تجهیزات (EQ-ring) در زیر سطح سکو ایجاد می گردد. این حلقه عبارت است از یک کابل ضخیم مسی که در زیر سطح سکو به صورت یک حلقه ی بسته نصب می گردد. تجهیزات الکتریکی نصب شده بر روی سطح سکو به صورت جداگانه توسط سیم ارت خود به این حلقه ی تجهیزات متصل می شوند. (تصویر4)
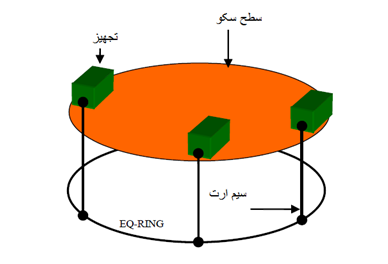
تصویر4: حلقه ی تجهیزات در زیر سطح سکو
پس از اتصال تجهیزات موجود در سکو به حلقه ی تجهیزات، حلقه ی تجهیزات به پایه های اصلی سکو متصل می گردد (تصویر5). با توجه به اینکه پایه های سکو تا عمق زیادی در کف دریا فرورفته اند می توانند نقش الکترودهای زمین بزرگی را بازی کنند که در صورت اتصال کوتاه مدار داخلی یک تجهیز به بدنه ی آن، جریان اتصال کوتاه را از طریق حلقه ی تجهیزات به کف دریا منتقل کنند. لازم به توضیح نیست که به دلیل هادی بودن آب دریا (آب نمک) مقداری از جریان اتصال کوتاه نیز از طریق آب دریا زمین خواهدشد.
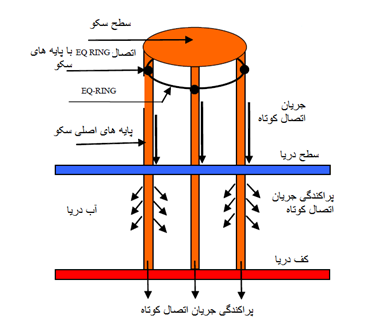
تصویر5: اتصال حلقه ی تجهیزات با پایه های سکو
هم محور کردن ماشینهای دوار به روش ریم و فیس
مترجم رضا کیانی موحد
اگر با موتورهای الکتریکی درگیر باشید حتما با مسئله ی الاینمنت یا هم محورسازی موتورها و دیگر تجهیزات دوار درگیر شده اید. مقاله ی زیر توضیح مختصری است درباره ی الاینمنت با روش ریم و فیس (Rim & Face).
می توان از روش ریم و فیس برای اجرای یک الاینمنت دقیق بهره گرفت. شما ممکن است که از براکتهای مختلفی برای الاینمنت استفاده کنید. توصیه می کنیم که از یک مجموعه ی تجاری ،که بتوان با آن شفتهایی با قطر مختلف را الاین کرد، استفاده کنید. براکت باید شامل مجموعه ای از میله ها برای کوژپلینگهایی با طول متفاوت باشد. این مجموعه باید فرآیند الاینمنت را تسریع کند. همچنین، مقادیر سگ باید قبل از شروع به کار اندازه گیری شود.
برای اجرای روش ریم و فیس شما باید:
· از تمیز بودن زیر پایه های دستگاه مطمئن شوید.
· ساعتها را بر روی براکت نصب کنید.
· اندازه های A و B و C را اندازه بگیرید.
· قرائت ساعتها را انجام دهید.
· میس الاینمنت عمودی را تعیین کنید.
· میس الاینمنت افقی را تعیین کنید.
· میس الاینمنت عمودی را تصحیح کنید.
· میس الاینمنت افقی را تصحیح کنید.
· قرائت را مجددا انجام داده و مقادیر را ثبت کنید.
نصب ساعتها و براکت

برای نصب براکتها مراحل زیر را انجام دهید:
1. پس از جداکردن کوپلینگ براکت را نصب کنید.
2. محور را بچرخانید تا براکت در ساعت 12 قرار بگیرد.
3. ساعت فیس را بر روی براکت نصب کنید. دسته ی ساعت باید در وسط قرار بگیرد.
4. ساعت ریم را بر روی براکت نصب کنید. دسته ی ساعت باید در وسط قراربگیرد.
اقدامهای احتیاطی
صرف نظر از سخت افزاری که به کار می برید اقدامهای احتیاطی زیر را انجام دهید:
· براکت را بر روی قسمت فلکسیبل کوپلینگ نبندید.
· ساعت فیس را در دورترین موقعیت ممکن نسبت به محور تجهیز ببندید. اگر ساعت فیس مستقیما بر روی کوپلینگ قرار می گیرد مطمئن شوید که دسته ی آن به لبه ی خارجی کوپلینگ نزدیک باشد.
· مطمئن شوید که براکت و ساعتها در موقعیتی قرارگرفته باشند که چرخش محور امکان پذیرباشد. در حالت ایده آل باید بتوانید محور را 360 درجه برچخانید.
قبل از شروع به اندازه گیری باید سگ ساعتها را بدست آورید و مطمئن شوید که قرائت شما قابل تکرار و صحیح است. برای مطالعه ی جزئیات به فصل دوم رجوع کنید.
اندازه گیری فواصل A و B و C

برای اندازه گیری فواصل A و B و C مراحل زیر را دنبال کنید:
1. اندازه ی A برابر است با قطری که ساعت فیس می پیماید. این فاصله باید کمی کمتر از قطر کوپلینگ باشد. این فاصله بسیار حیاتی است. در اندازه گیری آن دقت کنید.
2. اندازه ی B فاصله ی ساعت ریم تا مرکز پایه ی جلویی تجهیز می باشد. این اندازه گیری به موازات محور انجام می شود.
3. اندازه ی C فاصله ی بین پایه ی عقب و جلوی تجهیز می باشد. این اندازه گیری به موازات محور انجام می شود.
قرائت
برای قرائت مقادیر ساعتها مراحل زیر را دنبال کنید:
1. ساعتها را در موقعیت ساعت 12 قرار داده و صفر کنید.

2. محور را بچرخانید تا در موقعیت ساعت 3 قرار بگیرد. هر دو ساعت را بخوانید و مقادیر آنها را ثبت کنید.
3. محور را بچرخانید تا در موقعیت ساعت 6 قرار بگیرد. هر دو ساعت را بخوانید و مقادیر آنها را ثبت کنید.

4. محور را بچرخانید تا در موقعیت ساعت 9 قرار بگیرد. هر دو ساعت را بخوانید و مقادیر آنها را ثبت کنید.
5. محور را بچرخانید تا در موقعیت ساعت 12 قرار بگیرد. هر دو ساعت را بخوانید و مطمئن شوید که مقدار آنها صفر شده است.
مقادیر قرائت شده در جدولی مانند جدول زیر ثبت کنید. مقادیر سگ را در قرائتهای صورت گرفته تأثیر دهید.

تعیین میس الاینمنت عمودی
برای تعیین میس الاینمنت عمودی از فرمولهای زیر استفاده کنید:

تعیین میس الاینمنت افقی
برای تعیین میس الاینمنت افقی از فرمولهای زیر استفاده کنید:

محاسبه ی موقعیت پایه های جلو و عقب

محاسبه ی موقعیت پایه ی جلو:

محاسبه ی موقعیت پایه ی عقب:

مقادیر مثبت نشان دهنده ی بالا بودن پایه می باشد و شیم ها باید برداشته شوند. مقادیر منفی نشان دهنده ی پایین بودن پایه می باشد و باید شیم گذاری شود.
اقدامهای احتیاطی در هنگام قرائت
1. مطمئن شوید که اشتباه ریاضی در محاسبات نداشته اید.
2. تقدم عملیات را در محاسبات در نظر بگیرید. اول پرانتزها را ساده کنید.
3. در هنگام وارد کردن اعداد به فرمولها دقت کنید.
4. قبل از شروع محاسبه مطمئن شوید که قرائت صحیحی داشته اید.
محاسبه ی موقعیت پایه های جلو و عقب با استفاده از رسم گراف
برای ایجاد یک گراف مراحل زیر را انجام دهید:
1. از کاغذ شطرنجی استفاده کنید. کاغذ شطرنجی را به صورت افقی قراردهید.
2. یک خط افقی در مرکز کاغذ بکشید. این خط نشان دهنده ی محور تجهیزی است که الاینمنت نسبت به آن صورت می گیرد.
3. مقیاس افقی را مشخص کنید. از بزرگترین مقیاس ممکن استفاده کنید. می توانید طول تجهیز را تقسیم بر طول صفحه کنید.
4. در سمت چپ کاغذ یک محور عمودی رسم کنید. این خط نشاندهنده ی نقطه ای است که ساعت ریم به شفت یا کوپلینگ متصل می شود. (DIR)
5. با توجه به مقیاس افقی خط دوم را به اندازه ی B در سمت راست خط اول رسم کنید. این خط نشاندهنده ی پایه های جلویی تجهیز می باشد.(FF)
6. با توجه به مقیاس افقی خط سوم را به اندازه ی C در سمت راست خط دوم رسم کنید. این خط نشاندهنده ی پایه های عقبی دستگاه می باشد.(RF)
پس از کامل شدن مراحل بالا گرافی مشابه شکل زیر به دست می آید. در مثال زیر فواصل B و C برابر با 10 اینچ می باشند.

رسم میس الاینمنتها
پس از ایجاد گراف باید میس الاینمنت ها را بر روی آن مشخص کنید. یکی از آنها میس الاینمنت خوانده شده توسط ساعت ریم (DIR) و دیگری میس الاینمنت خوانده شده توسط ساعت فیس (DIF) می باشد. بدین منظور مراحل زیر را انجام دهید:
1. مقیاس عمودی را مشخص کنید. نوعا این مقیاس یک توزند (یا یک میکرومتر) برای هر خانه می باشد. اگر رقم میس الاینمنت بزرگ بود می توان از مقیاس 2 یا 3 توزند استفاده کرد.
2. میس الاینمنت ریم را بر روی خط عمودی اول (DIR) مشخص کنید. برای یافتن این نقطه، مقدار به دست آمده از محاسبه ی میس الاینمنت را باید تقسیم بر 2 کنید. محور افقی مبدا پیدا کردن این نقطه می باشد. اگر مقدار میس الاینمنت مثبت بود نقطه را در بالای محور افقی رسم کنید. اگر مقدار میس الاینمنت منفی بود نقطه را در پایین محور افقی رسم کنید.
3. پس از محاسبه ی میس الاینمنت فیس(DIF/A) ، آن را بر روی گراف رسم کنید. این نقطه با شمارش از نقطه ی قبلی به دست می آید. به اندازه ی A به سمت راست حرکت کنید و سپس میس الاینمت را در جهت عمودی مشخص کنید.
در مثال بالا میس الاینمنت ریم برابر با 10- توزند و میس الاینمنت فیس برابر با 4+ توزند و مقدار A برابر با 5 اینچ می باشد.

تعیین موقعیت محور تجهیز
پس از به دست آوردن نقاط میس الاینمنت برای تعیین موقعیت محور تجهیز مراحل زیر را دنبال کنید:
1. با استفاده از یک خط کش هر دو نقطه را به هم وصل کرده و این خط را تا خط عمودی نشان دهنده ی پایه ی عقب (RF) تجهیز ادامه دهید.
2. تعداد خانه های جدا شده بر روی خط های عمودی نشان دهنده ی پایه های جلویی (FF) و عقبی (RF) نشان دهنده ی جابجایی پایه ها و مقدار تصحیح آنها می باشد.
در مثال بالا پایه ی جلویی تجهیز 2 توزند پایین است که نیاز به شیم گذاری دارد. پایه ی عقبی دستگاه 6 توزند بالا است که باید شیمهای آن برداشته شوند.

احتیاط های لازم در رسم گراف
1. مطمئن شوید که از مقایسهای درستی استفاده کردید.
2. فواصل A و B و C را چک کنید.
3. مطمئن شوید که میس الاینمنت مثبت در بالای محور افقی و میس الاینمنت منفی در زیر آن رسم شده باشد.
4. اگر محور تجهیز بالاتر از محور افقی بود یعنی محور تجهیز به سمت بالا انحراف دارد. اگر محور تجهیز پایین تر از محور افقی بود یعنی محور تجهیز به سمت پایین انحراف دارد.
5. برای تعیین جابجایی افقی دستگاه باید گراف مشابه دیگری رسم کنید و از بالا به تجهیز نگاه کنید. مراحل بالا را به ترتیب بر روی گراف انجام دهید تا مقدار جابجایی دستگاه در جهت افقی به دست آید. اگر محور تجهیز بالاتر از محور افقی بود یعنی محور تجهیز به سمت راست انحراف دارد. . اگر محور تجهیز پایین تر از محور افقی بود یعنی محور تجهیز به سمت چپ انحراف دارد.
تصحیح در جهت عمودی
برای تصحیح میس الاینمنت در جهت عمودی مراحل زیر را انجام دهید:
1. موقعیت عمودی پایه های تجهیز را با استفاده از محاسبه یا رسم گراف بدست آورید. مقادیر مثبت بدان معنی هستند که تجهیز بالا است و باید شیمهایش برداشته شوند. مقادیر منفی بدان معنی هستند که تجهیز پایین است و باید زیر آن شیم گذاری شود.
2. به مقدار لازم شیمها را از زیر پایه های جلویی و عقبی تجهیز بردارید یا اضافه کنید.
3. قبل از شیم گذاری ضخامت شیمها را با میکرومتر اندازه گیری کنید. مقادیر نامی شیم ها همیشه با مقادیر واقعی آنها برابر نیستند.
تصحیح در جهت افقی
برای تصحیح میس الاینمنت در جهت افقی مراحل زیر را دنبال کنید:
1. ساعتها را در موقعیت ساعت 9 قرار دهید و صفر کنید.
2. در صورت امکان هر دو محور را بچرخانید و در ساعت 3 قرار دهید.
3. ساعتها را در نصف مقادیر تصحیح تنظیم کنید.
4. پایه ی جلویی تجهیز را حرکت دهید تا ساعت ریم مقدار صفر را نشان دهد.
5. پایه ی عقبی تجهیز را حرکت دهید تا ساعت فیس عدد صفر را نشان دهد.
6. مراحل 4 و 5 را آن قدر انجام دهید که در هر دو طرف شفت ساعتها رقم صفر را نشان دهند.

http://reliabilityweb.com/index.php/articles/rim_face_alignment_method