برق-قدرت
اینجا فقط از برق و الکترونیک و کامپیوتر حرف می زنیمبرق-قدرت
اینجا فقط از برق و الکترونیک و کامپیوتر حرف می زنیمدرباره من
 از کتاب خواندن خیلی لذت می برم و از فیلم دیدن... همین و بس
ادامه...
از کتاب خواندن خیلی لذت می برم و از فیلم دیدن... همین و بس
ادامه...
مدارات محاسبه کننده آنالوگ؛ قسمت اول
مترجم رضا کیانی موحد
منبع
https://www.allaboutcircuits.com/textbook/semiconductors/chpt-9/computational-circuits/
هنگامی که کسی کلمه "کامپیوتر" را ذکر می کند، یک دستگاه دیجیتال اولین چیزی است که معمولا به ذهن می رسد. مدارهای دیجیتال مقادیر عددی را در فرمت باینری نشان می دهند: الگوهای 1 و 0 توسط بسیاری از مدارهای ترانزیستوری که در حالت اشباع یا قطع هستند نشان داده می شوند. با این حال، مدارهای آنالوگ نیز می توانند برای نشان دادن مقادیر عددی و انجام محاسبات ریاضی، با استفاده از سیگنال های ولتاژ متغیر به جای حالت های روشن/خاموش (گسسته) به کار گرفته شوند.
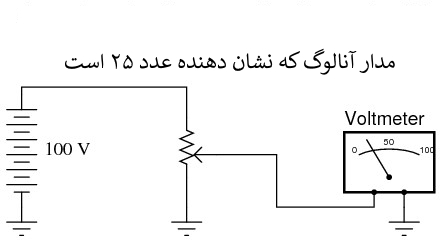
در اینجا یک مثال ساده از نمایش دودویی (دیجیتال) در مقابل نمایش آنالوگ عدد "بیست و پنج" نشان داده شده است:
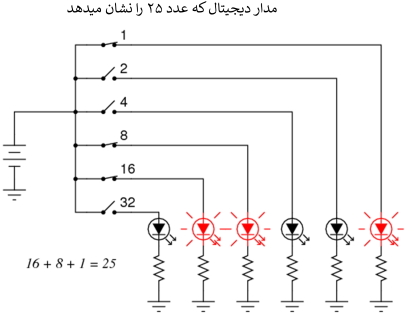
مدارهای دیجیتال بسیار متفاوت از مدارهای آنالوگ هستند.
مدارهای محاسباتی دیجیتال می توانند فوق العاده پیچیده باشند و اغلب، محاسبات باید در مراحل متوالی انجام شوند تا پاسخ نهایی را بدست آورند، شبیه به یک انسان محاسبات ریاضی را مرحله به مرحله با مداد و کاغذ انجام می دهد. از سوی دیگر، در مقایسه با مدارهای دیجیتال، مدارهای محاسباتی آنالوگ بسیار ساده هستند و محاسبات خود را در حالت مداوم و در زمان واقعی انجام می دهند. یک مشکل برای استفاده از مدارهای آنالوگ برای نشان دادن اعداد وجود دارد: عدم دقت. مدار دیجیتالی که در بالا نشان داده شده است، دقیقا به عدد بیست و پنج اشاره دارد. مدار آنالوگ نشان داده شده در بالا ممکن است (یا ممکن نیست) به طور دقیق بر روی 25 ولت کالیبره شده باشد، اما این موضوع به "رانش" و خطا مربوط است.
در کاربردهایی که دقت خیلی مهم نیست، مدارهای محاسباتی آنالوگ بسیار عملی و مناسب هستند. در اینجا چند مدار ساخته شده از تقویت کننده های عملیاتی برای انجام محاسبات آنالوگ نشان داده شده است:
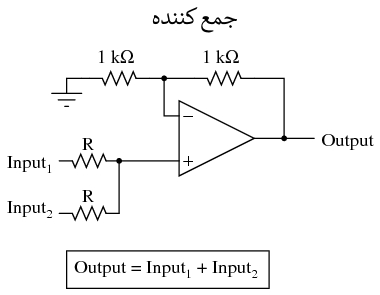
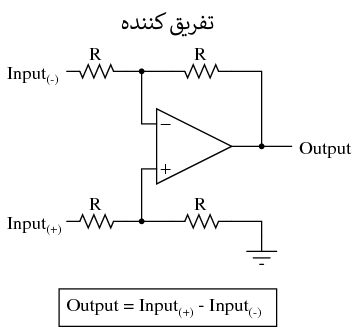
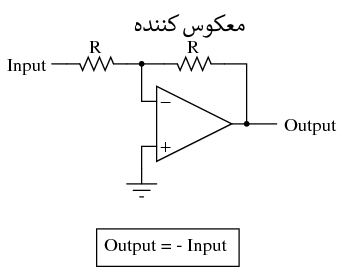
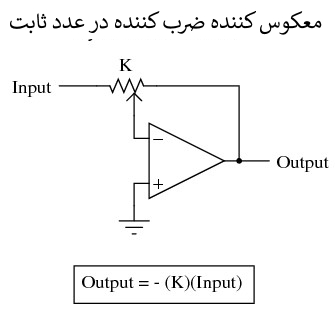
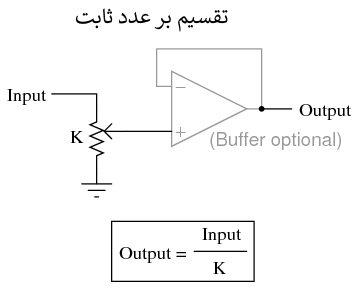
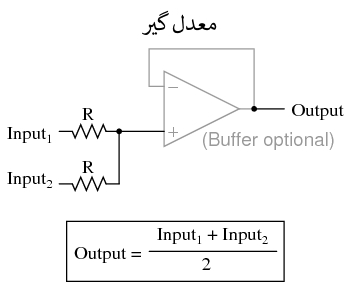
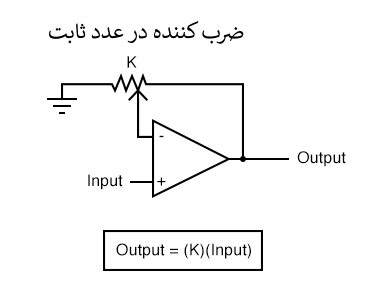
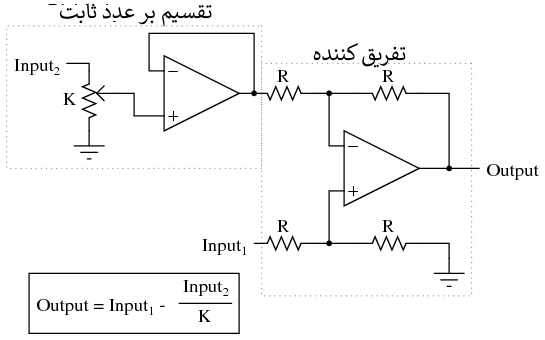
برای محاسبات پیچیده تر، هر یک از این مدارها می تواند به صورت ماجولار ب استفاده شوند تا مدار بزرگتری ایجاد شود. به عنوان مثال، فرض کنید که ما نیاز به کم کردن کسری از یک متغیر را از متغیر دیگری داریم. با ترکیب یک مدار تقسیم بر عددی ثابت با یک مدار تفریق کننده، می توانیم عملکرد مورد نیاز را بدست آوریم:
قبلا دستگاههایی که "کامپیوترهای آنالوگ" نامیده می شوند، در دانشگاه ها و مغازه های مهندسی رایج بودند. برای مدلسازی ریاضی، معمولا با هدف شبیه سازی برخی از فرآیندهای فیزیکی که معادلات اساسی آنها شناخته شده بود، در این کامپیوترهای آنالوگ ده ها مدار تقویت کننده عملیاتی می توانستند با اتصالات موقت به هم وصل شوند. کامپیوترهای دیجیتال کامپیوترهای آنالوگ را به کلی منسوخ کرده اند، اما مدارهای محاسباتی آنالوگ را نمی توان، از نظر ظرافت و صرفه جویی در اجزای ضروری، به خاطر مدارهای دیجیتال کنار گذاشت.
مدارهای محاسباتی آنالوگ، با استفاده از خازن در یک حلقه فیدبک یک تقویت کننده عملیاتی، در عملیات حسابی انتگرال گیری و مشتق گیری در طول زمان برتر هستند. با این حال، برای درک عملکرد و کاربردهای این مدارات، ابتدا باید معنای اساسی این مفاهیم محاسباتی را درک کنیم. خوشبختانه، استفاده از مدارهای تقویت کننده عملیاتی برای حل مشکلات محاسباتی جهان واقعی، به عنوان یک ابزار عالی برای تدریس حساب پایه به کار می رود. به گفته جان یاس اسمیت در کتاب آموزش عالی طراحی مدارات عملیاتی مدرن:
"یادداشت تشویقی برای خوانندگان راستین: محاسبات انتگرالی یکی از شاخه های ریاضی است که از تقویت کننده های عملیاتی بهره می برد و، در عمل، موانع فهم را از پیش پای برمی دارد."
احساسات آقای اسمیت در مورد ارزش آموزشی مدارهای آنالوگ به عنوان یک ابزار آموزشی در ریاضیات منحصر به فرد نیست. در نظر بگیرید نظریات مهندس جورج فاکس لنگ را در مقاله ای که برای شماره آگوست 2000 نشریه صدا و لرزش نوشته است:
"آنالوگ یک علامت تجاری کامپیوتر نبود! ایجاد یک موجود فیزیکی واقعی (یک مدار) تحت هدایت مجموعه ای از معادلات خاص و در تعامل با آنها، بصیرت منحصر به فردی را به آن معادلات ریاضی می دهد. برای بسط یک شهود درباره تأثیر متقابل بین فیزیک و ریاضیات، هیچ راهی بهتری از تجربه چنین تعاملی وجود ندارد. کامپیوتر آنالوگ ابزار قدرتمند بین رشته ای بود که بسیاری از اساتید در حوزه های گوناگون در ماتم فقدان آن هستند."
مشتق گیری اولین عملیاتی است که معمولا در شروع حساب توسط دانش آموزان یاد گرفته می شود. به عبارت ساده، مشتق گیری تعیین نرخ تغییر لحظه ای یک متغیر است نسبت به یک متغیر دیگر. در مدارهای مشتق گیر آنالوگ، متغیر مستقل زمان است و بنابراین نرخ تغییراتی که با آن برخورد می کنیم نرخ تغییر سیگنال الکترونیکی (ولتاژ یا جریان) است نسبت به زمان است.
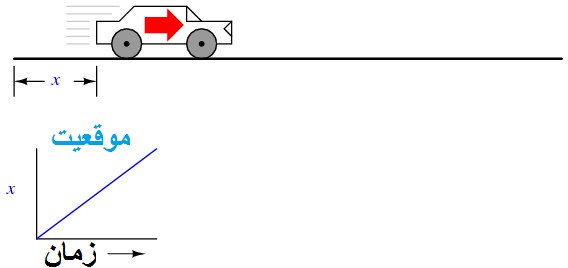
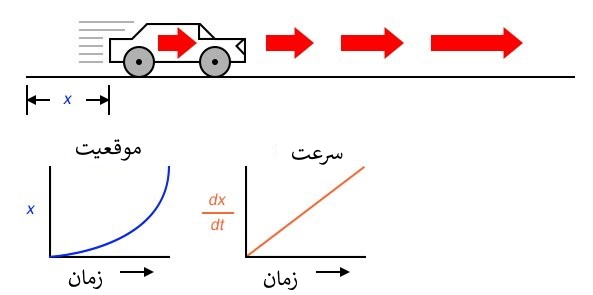
فرض کنید ما قرار است تا موقعیت یک خودرو را اندازه بگیریم که از نقطه شروع و در مسیر مستقیم (بدون چرخش یا گردش) حرکت می کند. اجازه بدهید تا این اندازه را X نام دهیم. اگر خودرو با نرخی حرکت کند به طوری که فاصله آن از " نقطه شروع" به طور پیوسته در طول زمان افزایش بیابد، موقعیت آن به عنوان یک تابع خطی (خط مستقیم) رسم می شود:
اگر مشتق موقعیت خودرو نسبت به زمان (یعنی تعیین نرخ جابجایی موقعیت خودرو نسبت به زمان) را محاسبه کنیم، به سرعت خودرو می رسیم. مشتق تابع با نماد کسری d/d نشان داده می شود، بنابراین وقتی مشتق موقعیت (x) را نسبت به زمان (t) می گیریم، نتیجه (مشتق) را به شکل dx/dtنمایش می دهیم.
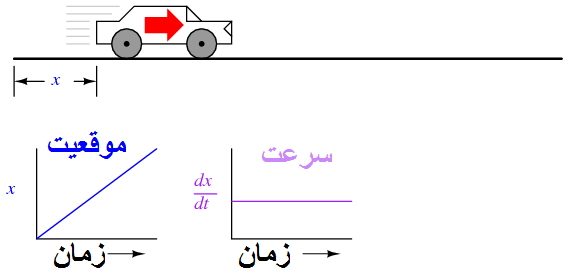
مشتق تابع خطیx نسبت به زمان، مثلا مشتق موقعیت (dx/dt)که معمولا سرعت نامیده می شود، یک خط صاف بدون تغییر است. مشتق یک تابع ریاضی هنگام رسم بر روی نمودار می تواند به صورت شیبدار نمایش داده شود، و در اینجا می توانیم ببینیم که نمودار موقعیت(x) دارای یک شیب ثابت است، به این معنی که مشتق آن (dx/dt) باید نسبت به زمان ثابت باشد.
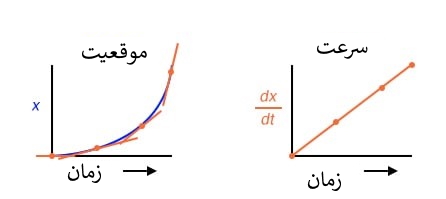
فرض کنیم که موقعیت خودرو نسبت به زمان به صورت نمایی افزایش بیابد: یعنی سفر خود را با حرکت آهسته شروع کرده، اما درهر دوره زمانی فاصله بیشتری را طی می کند. می بینیم که مشتق موقعیت (dx/dt)، یا همان سرعت(v) ، در طول زمان ثابت نبوده و افزایش می یابد.
ارتفاع نقاط در نمودار سرعت متناظر است با نرخ تغییر (شیب) نقاط متناظر همان نقاط در نمودار موقعیت است.
این مسائل با مدارهای الکترونیکی آنالوگ چه ربطی دارند؟ خوب، اگر ما یک سیگنال ولتاژ آنالوگ داشته باشیم که نشان دهنده موقعیت خودرو باشد (تصور کنید یک پتانسیومتر بزرگ داریم که سر وسط آن به خودرو متصل است و ولتاژی متناسب با موقعیت خودرو می سازد)، می توانیم یک مدار مشتق گیر به این سیگنال وصل کنیم و مداری داشته باشیم که به طور ثابت سرعت خودرو را محاسبه می کند و آن را از طریق یک ولتمتر متصل به خروجی مدار مشتق گیر نشان می دهد.
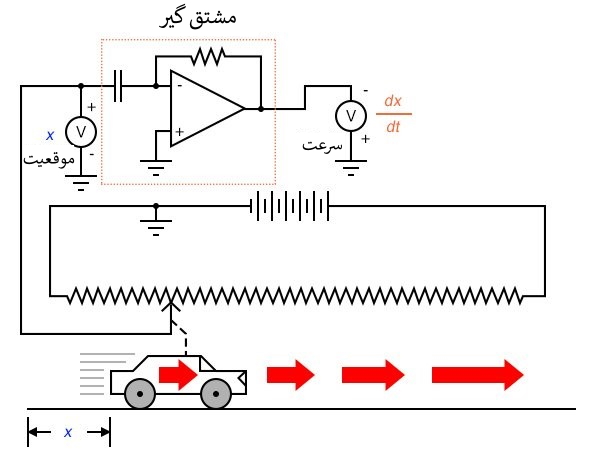
به یاد داشته باشید که خروجی یک مشتق گیر ولتاژی متناسب با نرخ تغیرات ولتاژ ورودی نسبت به زمان(d/dt) است. بنابراین، اگر ولتاژ ورودی در طول زمان با نرخ ثابتی تغییر کند، ولتاژ خروجی یک دامنه ثابت خواهد داشت. اگر خودرو به گونه ای حرکت کند که فاصله طی شده نسبت به زمان نرخ ثابتی داشته باشد، به این معنی است که خودرو با سرعت ثابت حرکت می کند و مشتق گیر یک ولتاژ ثابت متناسب با سرعت را به خروجی می دهد. اگر فاصله طی شده توسط خودرو در طول زمان با نرخ غیر ثابتی تغییر کند، خروجی مدار مشتق گیر نیز غیر ثابت، اما متناظر با نرخ تغییرات ورودی نسبت به زمان، خواهد بود.
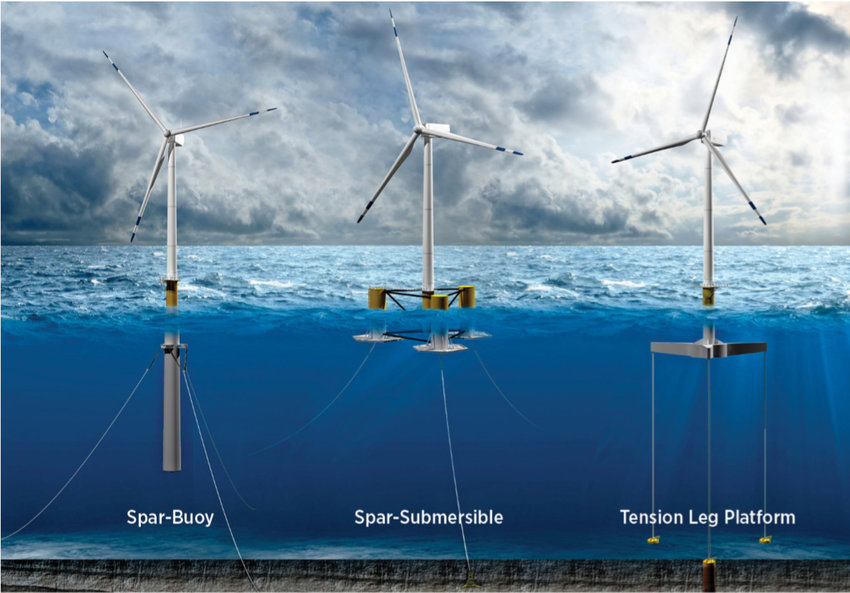
توربینهای بادی نصب شده در دریا
از ابتدای دهه 1990 بسیاری از کشورهای اروپایی به نصب توربینهای بادی در دریاهای مجاور خود پرداختند. امروزه این تکنولوژی در زمینه تولید برق یک تکنولوژی تثبیت شده است. روشهای نصب توربینهای بادی در دریا را می توانید در عکس زیر بببینید.
طراحی آسانسور با رویکرد دیجیتال، قسمت دهم
خوب دیگه به پایان بحث رسیدیم. حقیقت ش اینه که دیگه نقشه مقشه ای در کار نیست. مدار چار و پنج طبقه رو خودتون می تونید به راحتی بر اساس مدار فرمان ساختمون سه طبقه طراحی کنید.
اما چرا کشوندمتون اینجا. علتش ساده س. یه چیزی مونده که فک می کنم باس توضیحش بدم و بعد بحث رو تموم کنم.
اون یه نکته ی آخری هم اینه که داداش من تنبلی بسه!!! اگه می خوای این مطالب رو کپی پیست کنی و ببری بدی به استادت بخونه کور خوندی...... با این ادبیات بعیده که طرف بهت نمره بده. مجبوری کل مطلب رو از سر تا ته بخونی و بعد بشینی ویرایش ش کنی.... روی عکسها هم واتر مارک گذاشتم تا کپی پیست کردن شون سخت بشه.
من قصدم این بود که اینجا یه بحث فنی بکنم اما از اونجا که الان بچه درس خونهای مملکت خیلی دیگه بعله شدن ترجیح دادم که زبون نوشتاری م رو ب زبون گفتاری نزدیک کنم تا کار تنبل جماعت رو به اندازه ای که در توان م هست سخت کنم.
البته من می دونم که شما یی که اهل تقلب هستی در نهایت تقلبت رو میکنه و از هرفرصتی برای درس نخوندن استفاده می کنی. خوب برام مهم هم نیست... به درک که درس نمیخونی!
مخاطب اصلی من توی این ده تا نوشته اون معدود بچه درس خونهایی هستن که واقعا بچه درس خون هستن. اونها خودشون میتونن گلیم خودشون رو از آب بکشن بیرون. این دسته از آدما خودشون بدون تکیه به دیگران کارشون رو پیش می برن... نوشته های من فقط براشون می تونه نقش یه کاتالیزور رو بازی کنه.
پس به سلامتی بچه درس خونها....اونهایی که مغزشون رو قرار نیست آک بند تحویل حضرت عزرائیل بدن.
یا حق
رضا کیانی موحد
طراحی آسانسور با رویکرد دیجیتال، قسمت نهم
خوب! میبینم که ول کن نیستید و هنوز دوس داریدتا ادامه ی داستان رو براتون بگم. همون طور که گفتم یه فوت کوزه گری مونده تا بتونید یه مدار فرمان آسانسور طراحی کنید. اگه به آخرین عکس قسمت هشتم توجه بکنید میبینید که کنتاکتهایی که نشون دهنده ی سنسور طبقات هستند با دو نام متفاوت در نقشه اومدن: S و SW.
اما این که این تفاوت از کجا اومده و چرا وارد نقشه شده فوت کوزه گری هست که الان درباره ش بحث می کنیم. همین طور که گفتم فرض اولیه این بود که در هر طبقه یه میکروسوئیچ قرار داره که وقتی آسانسور به اون طبقه (و در حقیقت روبروی در آسانسور) میرسه فعال مشه. این میکرو سوئیچ رو در قسمتهای اول با S مشخص کردیم. حالا ِآیا SWها یه سری میکروسوئیچ دیگه هستند؟ خیر!
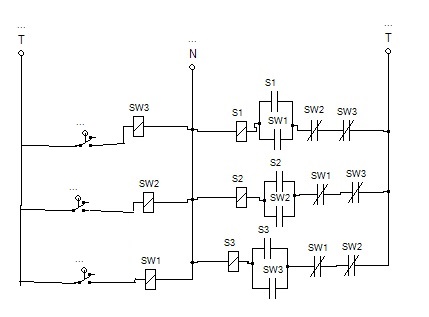
حقیقت اینه که وقتی آسانسور وارد طبقات میشه و میکروسوئیچ اون طبقه رو فعال میکنه ما به دو جور کنتاکتور نیاز داریم:
- یه کنتاکتوری که وقتی بوبینش برقدار بشه بلافاصله با حرکت آسانسور بی برق بشه. این کنتاکتور رو اسمش رو میذاریم SW و بوبین ش رو با خود میکروسوئیچ هر طبقه تغذیه می کنیم. پس این کنتاکتورها نیازی به کنتاکت نگه دارنده ندارن.
- یه کنتاکتور دیگه هم داریم که برقدار میشه ولی همین طور برقدار می مونه تا آسانسور حرکت بکنه و به طبقه ی بعدی/قبلی بره.بوبین این کنتاکتور رو با کنتاکت باز کنتاکتور SW همنام خودش تغذیه می کنیم و براش کنتاکت نگه دارنده می ذاریم و اسمش رو میذاریم S. این کنتاکتور وقتی که برقدار بشه همین طور برقدار می مونه. حالا چطوری باید برق ش رو قطع کنیم؟ با استفاده از کنتاکتهای بسته ی طبقه ی بعدی و قبلی.
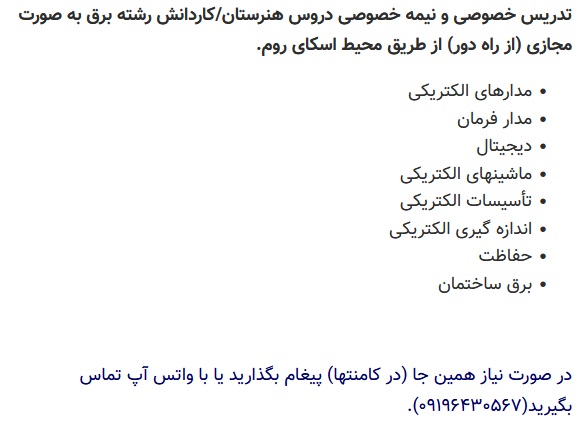
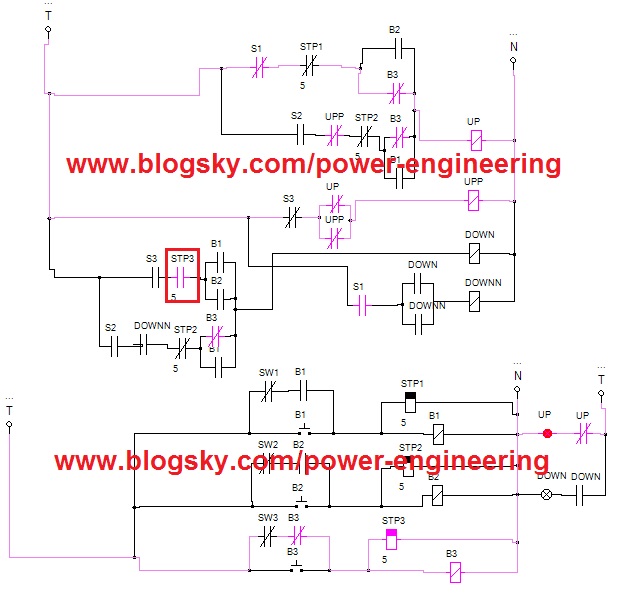
هر دو تا ردیف کنتاکتورهای رو می تونید توی نقشه ی زیر ببینید.
اگه به نقشه ی اول رجوع کنید می بینید که کنتاکت های SW رو سری کردیم با بوبین نگه دارنده ی کنتاکتورهایی که به پوش باتون های هر طبقه وصل هستند. با این روش اتاقک آسانسور به هر طبقه که برسه میادش و کنتاکتور پوش باتون اون طبقه رو خاموش می کنه. کنتاکت های کنتاکتورهای S رو هم در مسیر کنتاکتورهای UP و DOWN استفاده کردیم چون در این مسیر ها باید حرکت اتاقک آسانسور ادامه پیدا بکنه و تا زمانی که آسانسور وارد یه طبقه ی دیگه نشده باشه قطع نشه.
الان دیگه شما مدار فرمان کامل یه آسانسور برای ساختمون سه طبقه رو دارید.برای دیدن مدار فرمان آسانسور ساختمون چهار طبقه و بالاتر فردا دوباره بیایید همینجا و مهمون ما باشید.